Shan Li, Peng Xiao*, Wei Zhou, Yun Liang, Shiao‑Wei Kuo, Tao Chen*
Nano-Micro Letters (2022)14: 32
https://doi.org/10.1007/s40820-021-00775-4
2. 通过表面功能化修饰策略对疏水弹性体涂层进行调节,可以有效地控制不对称三层结构的超疏水PDMS/CNTs/PDMS复合薄膜(PCPM)表面润湿性,并在60%的外加应变下仍保持超疏水特性。
3. 基于自支撑形式的PCPM薄膜应变传感器可实现不同频率、强度的降雨及太阳光强弱的实时天气监测。此外,该自支撑传感器还可以进一步实现水下快速漂浮、载重、快速运输和全程实时电流监测的多功能水上救援。
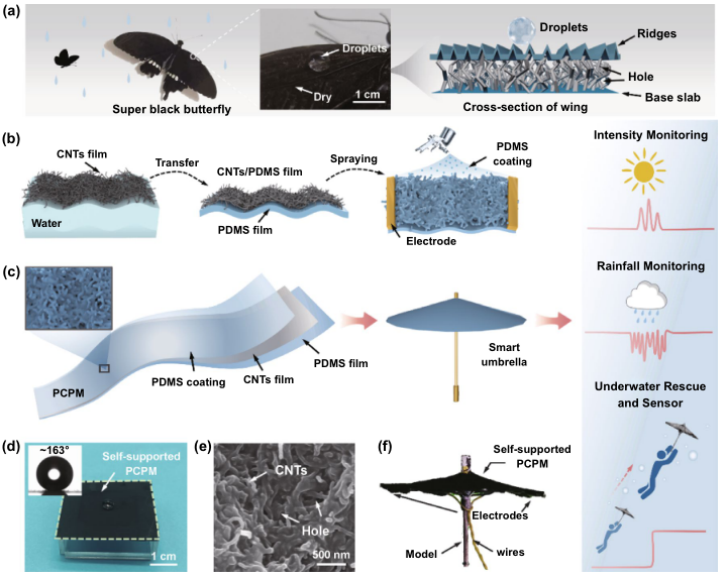
在自然界中,生物体为了长久生存和繁衍进化出许多优异的特性,例如一些鸟类羽毛及蝴蝶翅膀的超疏水性、鱼鳞的非浸润性等,以适应外部环境达到生存的目的。如图1(a)所示,超黑蝴蝶翅膀由亚微米孔阵列和纳米级脊的分层结构组成。这种多层次的结构与多级孔洞结合,可以有效地防止水滴渗入翅膀,从而使水迅速从表面滑落。基于该结构的启发,在水/空气界面将导电CNTs和柔性疏水聚合物PDMS进行组装获得CNTs/PDMS复合薄膜,随后采用表面功能化修饰策略在CNTs/PDMS上喷涂超薄的PDMS涂层以加强界面和传感稳定性。如图1(d)和1(e)所示,获得的自支撑PCPM基柔性传感器具有~163°的水接触角。在显微镜下观察到,恰当浓度的PDMS涂层不会显著影响表面粗糙度。相反,PDMS涂层就像一层“盔甲”,保护表面免受破损。基于自支撑形式的PCPM “微型智能伞”可实现不同强度的降雨、太阳光强弱的实时天气监测以及水下快速漂浮、全程实时电流监测的多功能水上救援。
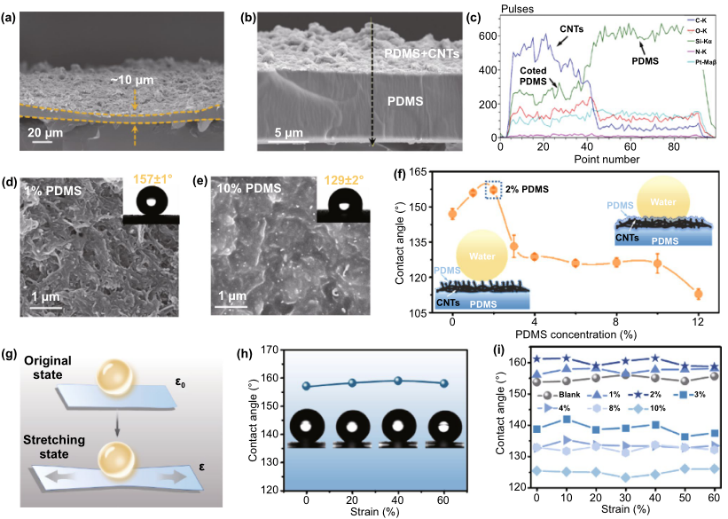
为了进一步探究超润湿性与微观结构之间的关系,我们对PCPM的SEM截面图和元素分布进行了分析。如图2(a)所示,水/空气界面制备的约10 μm的PCPM一侧形成了粗糙表面并且Si元素均匀分布,这清晰地说明PDMS包覆在每根CNTs周围并形成连续的聚合物层,以确保PCPM表面的超疏水稳定性。为了进一步探究PDMS浓度对PCPM疏水性能的影响,调控喷涂的PDMS浓度发现浓度为1 wt% PDMS涂层的PCPM具有清晰可见的粗糙结构和超疏水性能,其WCA为157.1°。然而,当PDMS浓度增加10 wt%时,粗糙的CNTs微观结构几乎被PDMS完全覆盖,表面相对光滑,WCA降低至129.2°。原子力显微镜(AFM)图像进一步证明了随着PDMS涂层浓度的增加,计算得到的PCPM薄膜表面均方根粗糙度(Rq)从136 nm显著降低到77.5 nm,与图2(f)中WCA变化趋势基本一致。在0 ~ 60%的拉伸过程中,2 wt% PCPM的WCA保持在155°以上的稳定状态,表明类“盔甲”PDMS涂层可以形成弹性保护层,避免机械应变导致性能下降。
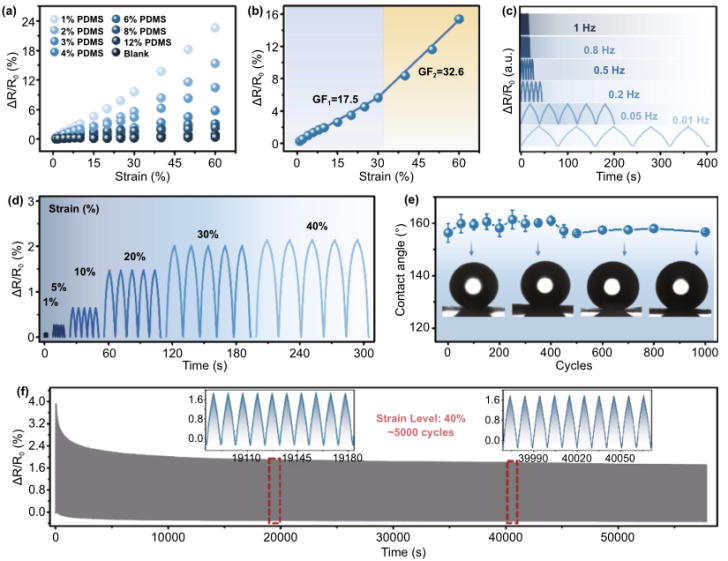
通过归一化电阻(ΔR/R₀)变化表征了不同喷涂浓度条件下PCPM应变传感器的不同传感性能。如图3(a)所示,随着PDMS喷涂浓度的增加,复合膜在0-60%的拉伸应变下的电阻变化显著降低,这表明基于PCPM的应变传感器的灵敏度受到涂覆PDMS浓度的影响。PCPM应变传感器的灵敏度分别为17.54 (ε: 0.30%)和32.59 (ε: 30-60%),线性响应度分别为0.994和0.993。基于PCPM的应变传感器在不同频率(0.01-1 Hz)下以及不同应变拉伸下的电学信号均表现出良好的循环稳定性。除机械传感性能外,当在40%应变下循环拉伸1000次时,传感器也能保持稳定的超疏水特性和高WCA值(>155°)。为了进一步测量PCPM长期机械传感的稳定性,在应变为40%、频率为0.2 Hz的5000次循环下,PCPM的应变传感器可以承受长时间的应变和保持电学稳定性,为进一步的机械传感应用奠定了基础。
IV 液滴检测性能及液滴平衡传感器
自支撑式PCPM基应变传感器展现出有趣的应用。如图4(a-d)所示,PCPM基传感器能够灵敏的检测液滴下落的频率、液滴大小以及液滴下落的高度。进一步将其制备成十字交叉结构的方向平衡传感器以检测来自东南西北四个方向的不平衡,这在日常生活中至关重要。例如,大型卡车在出厂时需要进行平衡测试,以防止危险事故的发生。如图4(f)所示,当液滴平衡传感器在东、西、南、北四个方向有规律地不平衡时,可依次检测到相应的信号变化,从而做出相应调整以规避事故的发生。
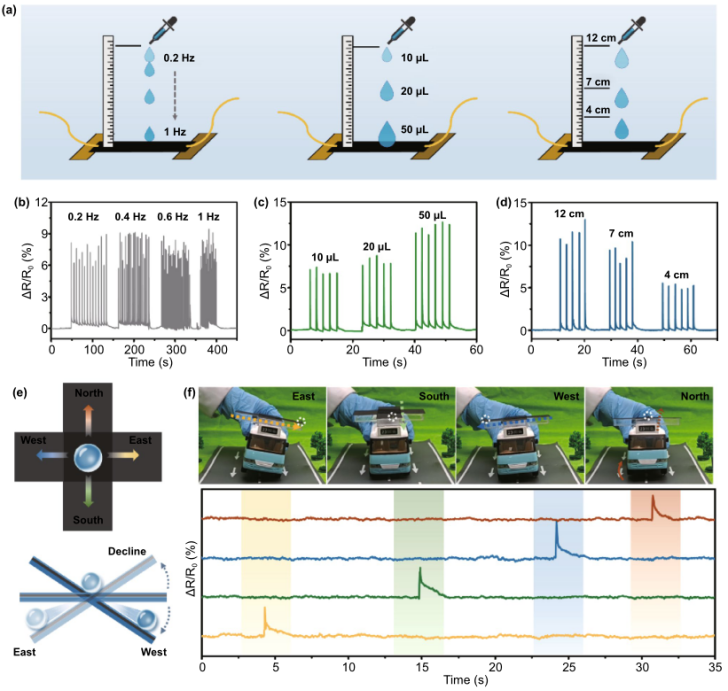
图4. (a) 不同频率(0.2、0.4、0.6、1 Hz)、不同体积(10、20、50 μL)、不同降落高度(12、7、4 cm)的液滴下落在PCPM上的示意图;(b-d) 基于PCPM的应变传感器在不同频率、不同体积和不同降落高度下的相对电阻变化曲线;(e) PCPM基液滴方向平衡传感原理图;(f) PCPM基液滴平衡检测仪在东、南、西、北四个方向下工作的图片及相应的相对电阻变化曲线。
V 用于天气监测的PCPM基多功能智能雨伞
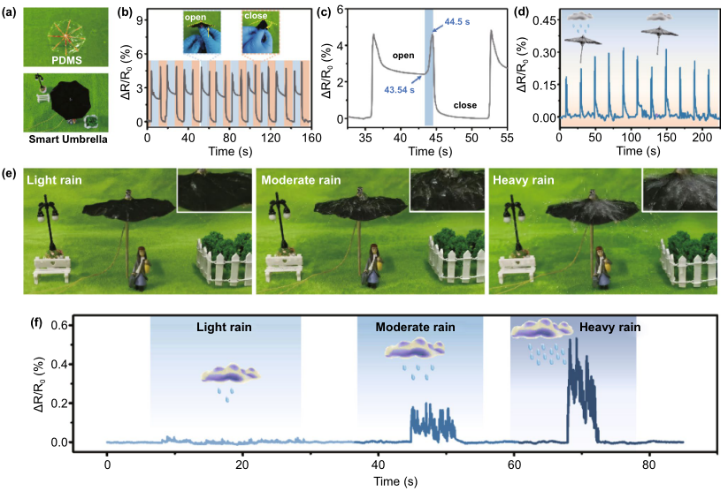
图5. (a) 自支撑智能伞的数字图片;(b-c) 智能雨伞在开闭过程中的相对电阻变化及开闭之间的时间响应曲线;(d) 智能伞对阴天、雨天的相对电阻变化曲线;(e-f) 自支撑式智能伞监测小雨、中雨、大雨时的照片及相应的相对电阻变化曲线。
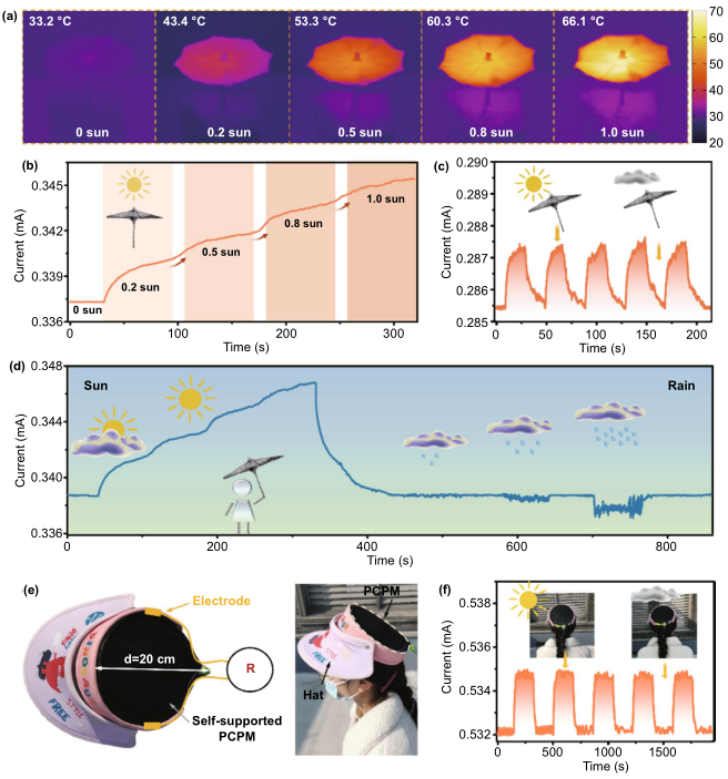
图6. (a) 不同光强下智能伞的红外图像;(b) 不同太阳光强下智能伞的电流-时间曲线;(c) 智能伞在有(0.5sun)或没有阳光下的电流-时间曲线;(d) PCPM基智能伞识别一天内天气变化的电流-时间曲线;(e) 自支撑式智能遮阳帽的结构图;(f) 智能伞在有无阳光时的电流-时间曲线(0.5sun)。
VI 用于水上救援和传感的PCPM基多功能智能雨伞
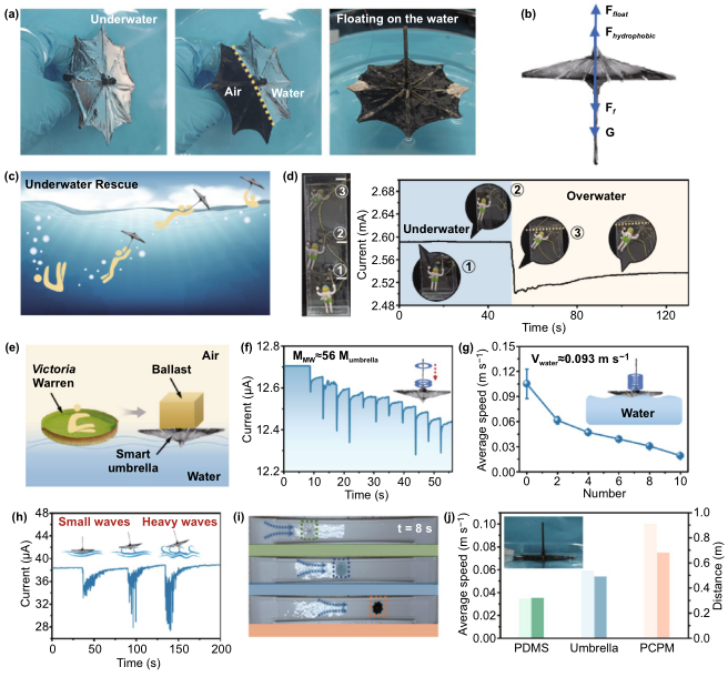
图7. (a) 智能伞在水下、空气中和水面上漂浮的照片;(b) 智能伞在水下的受力分布图;(c) 智能伞水下救援的全过程示意图;(d) PCPM基智能伞水下救援模型图及上升过程中实时电流-时间曲线;(e) 碗莲在水上载人示意图;(f) 智能伞承载不同铁环数目时的电流-时间曲线;(g) 承载不同重量的智能伞在水面运行的平均速度;(h) 智能伞在小、中、大浪水面上的电流-时间曲线;(i) 在流速为0.093 m s⁻¹时(总距离为1 m),纯PDMS伞、纯油纸伞和PCPM伞在t = 8 s时的位置;(j) PDMS伞、纯油纸伞和PCPM伞在流速为0.093 m s⁻¹时的平均速度和距离。
 黎姗
黎姗
本文第一作者
中国科学院宁波材料所 博士研究生
仿生超疏水碳/高分子非对称薄膜的构建及其多功能应器。
 陈涛
陈涛
本文通讯作者
中国科学院宁波材料所 研究员
▍Email: tao.chen@nimte.ac.cn
 肖鹏
肖鹏
本文通讯作者
中国科学院宁波材料所 副研究员
▍Email: xiaopeng@nimte.ac.cn
Tel: 021-34207624
如果文章对您有帮助,可以与别人分享!:Nano-Micro Letters » 实时天气监测和水上救援:基于自支撑超疏水弹性导电薄膜的应变传感器
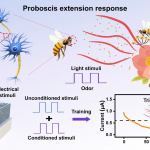 山东大学李阳团队:成功模拟生物联想学习行为(如手写体识别)的光电子突触器件,助力神经形态计算
山东大学李阳团队:成功模拟生物联想学习行为(如手写体识别)的光电子突触器件,助力神经形态计算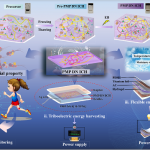 华科赵龙教授等:环境耐受性双网络离子导电复合水凝胶材料用于高性能柔性电子器件
华科赵龙教授等:环境耐受性双网络离子导电复合水凝胶材料用于高性能柔性电子器件