Magnetic Array Assisted Triboelectric Nanogenerator Sensor for Real‑Time Gesture Interaction
Ken Qin, Chen Chen, Xianjie Pu*, Qian Tang*, Wencong He, Yike Liu, Qixuan Zeng, Guanlin Liu, Hengyu Guo, Chenguo Hu*
Nano-Micro Letters (2021)13: 51
https://doi.org/10.1007/s40820-020-00575-2
1. 在单位时间内对正/负脉冲进行计数,从而可以实时感知手指运动的角度、速度和方向。
2. 磁阵列的滑动结构将滑动运动转化为接触/分离运动,从而提高了器件的耐用性和在低速时的信号幅度。
3. 磁性轨道限制了滑动方向,从而大大提高了稳定性。
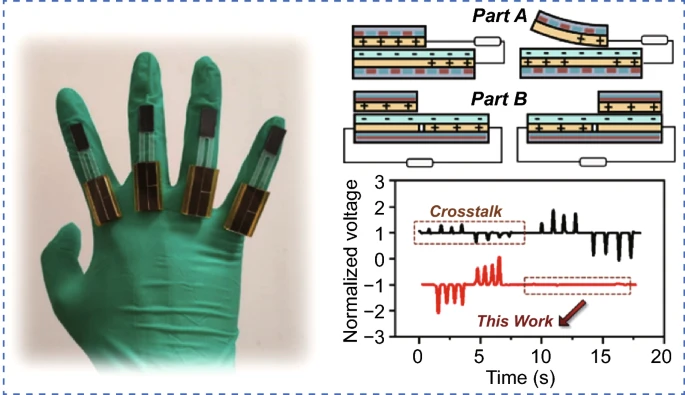
近年来机械手在生产生活中发挥着越来越重要的作用,它可以模拟人手的活动而代替人手从事大量高重复性,高危险性的工作。随着应用领域的发展,传统的人机交互已经不能满足人们的需求,应用的发展要求机械手更加灵活,便携,甚至可穿戴。在技术层面上要解决的则是精确感知每个手指的运动,这就对手指运动信号采集带来了极大挑战。近年来基于摩擦起电和静电感应耦合的摩擦纳米发电机(TENG)在生理信号采集、机械信号检测等方面显示了巨大的潜力与优势,并且已经被应用于能量收集和自供电机械传感。基于此,该论文报道了一种基于摩擦纳米技术与Halbach Array结构的自供能位移传感器件(Ma-s-TS),并基于此传感器构建了一套实时的手势识别系统,用于实现人手和机械手之间的实时手势交互。重庆大学胡陈果课题组在滑动模式的摩擦纳米发电机中加入了Halbach Array结构——一种磁极周期性排列的结构,其内部的多极磁阵,可将手指的屈伸牵引运动转换为传感器内部结构之间的连续接触分离。利用这些微弱机械运动,传感器可以自己产生正/负脉冲信号。通过单位时间内的脉冲计数,实现手指屈伸的角度、速度和方向的判定。此外通过结构的优化,提高了系统的耐久性、低速信号幅值和稳定性。这种直接量化方法和对可穿戴传感器的优化,为实现自然、直观、实时的人机交互提供了一种新的策略。
I Ma-s-TS的结构
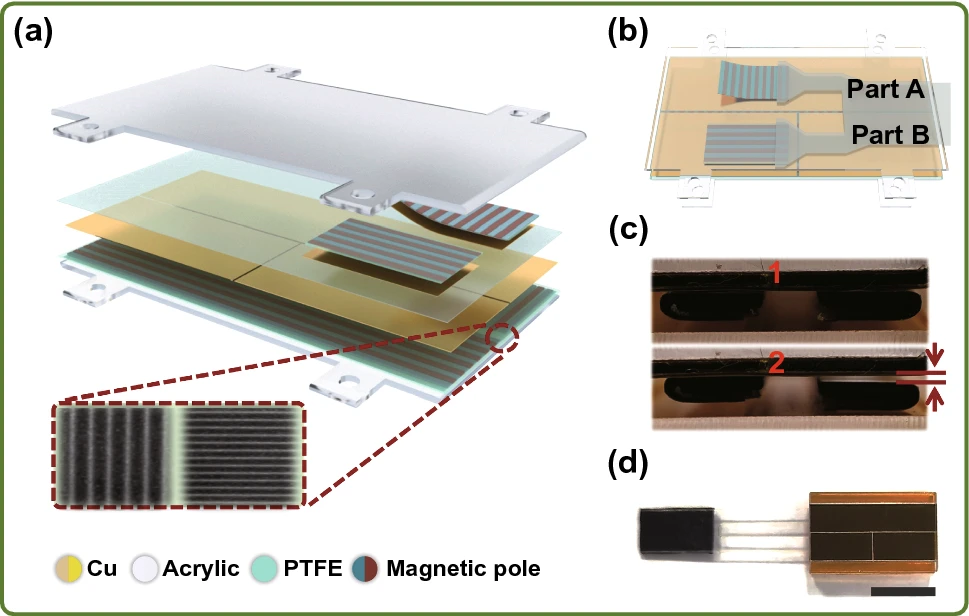
Ma-s-TS的器件结构如图1所示,该传感器件由定子和滑块两部分组成。定子从底部到顶部的多层结构依次是丙烯酸基板、halbach磁橡胶阵列、金属电极以及聚四氟乙烯薄膜。其中,磁橡胶的磁极分布方向相互垂直。滑块从下到上依次是金属铜和磁条,磁条的方向与底部定子中对应的磁条方向相同。图1(a)中的插图展示了基板和滑块上磁性阵列的显影照片。左侧的磁阵是为了限制磁铁的滑动,形成稳定滑动的吸引轨道,而右侧部分主要目的是通过滑动过程中磁场极性的变化,将滑动运动转换为接触/分离运动。图1(c)展示了滑块的右部在滑动过程中,定子与滑块的接触与分离状态。在此过程中,滑块的左侧部分与定子处于相互吸引状态。
图1. (a) Ma-s-TS的原理图和多层结构。插图:基板和滑块上磁阵列的显影照片。(b) 总体结构图。(c) 磁阵列辅助接触分离状态(顶部和底部)。(d) 制作的传感器照片(比例尺:1cm)。
II Ma-s-TS的操作原理
Ma-s-TS的工作原理如图2所示。首先如图2(a)所示,由于不同材料之间得失电子的能力不同,当金属和聚四氟乙烯薄膜接触后,这两个材料会在接触表面形成符号相反的表面电荷。对于Part A,当在外力作用下发生分离时,金属和聚四氟乙烯下面的电极之间会形成感应电势差。如果两个电极通过负载连接在一起,为了平衡静电场,电子会通过负载从一个电极流向另一个电极。对于Part B,金属和聚四氟乙烯接触后,金属会带上正电荷。当带正电的金属在底部两个电极之间往复运动时,底部两个电极之间的电势差会发生变化。为了平衡电势差的变化,当两个电极通过负载连通时,电子会在两个电极之间来回转移。所以Part A部分会产生一系列周期性的窄脉冲,而Part B部分,在滑动周期中会产生交替的宽脉冲信号。将这个种不同的信号进行耦合,我们就可以得到代表手指弯曲/伸展的一系列正/负脉冲。为了支撑前面解释的工作原理,Part A和Part B在运动过程中开路状态下电极的电势的变化可以通过COMSOL进行了模拟描述。并且通过实际测量,得到了图2(d–f)中两个独立部分和耦合电路中检测到的真实信号。
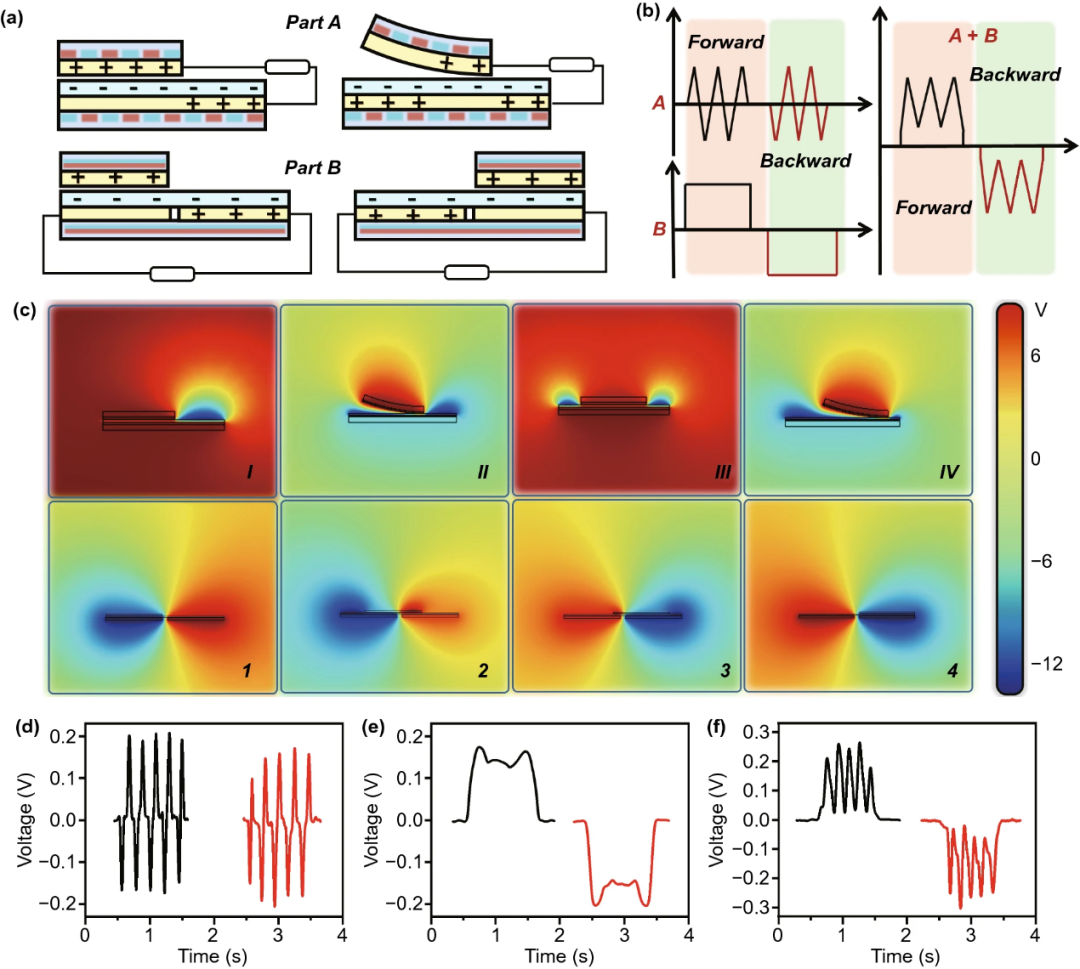
图2. (a) 滑动中电子转移过程的示意图。(b) 滑动过程中输出信号的示意图。(c) 有限元模拟滑动过程中开路状态下电势分布。(d-f) Part A、Part B、耦合后对应的实际测试输出信号。
根据上述原理,以Ma-s-TS为基础,利用LabVIEW平台构建了一套人手-机械手同步动作系统来直观地控制机械手。图3(a)显示了戴在手指上的Ma-s-TS传感器。图3(b)和(C)分别是在手指完成“弯弯弯直弯弯直直直直”过程中,产生的正/负脉冲信号,以及机械手变化相位图。这表明了机器人手指的运动与人类手指的运动实时完全/完全同步,能够实时多方向连续控制。此外,Ma-s-TS在多通道控制中也显示出良好的稳定性。当某些手指弯曲时,由于手指间的联动,其他手指通常会不自觉地被驱动。Ma-s-TS得益于磁力对滑块的限制,可以有效地抑制不同通道之间的干扰。在这里,Ma-s-TS通道之间的干扰(e)与先前的关节运动摩擦电量化传感器(d)进行了比较。Ma-s-TS更稳定,因此抑制了手指联动引起的干扰,这对于实现稳定的实时手势交互非常重要。
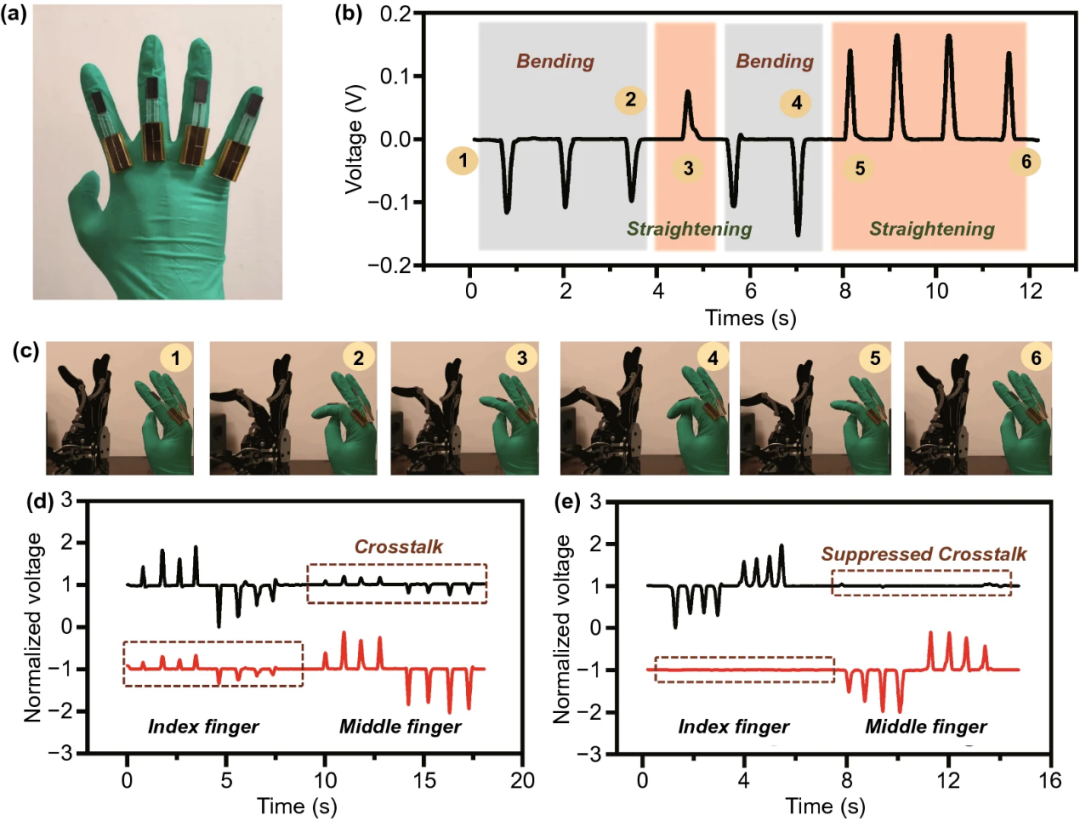
图3. (a) 戴在手指上的Ma-s-TS。(b) 正负脉冲表示手指伸直和弯曲。(c) 基于图(b) 信号的机械手和人手的实时手势交互。(d–e) 与jmTQS在信道间干扰的比较(d. jmTQS,e. Ma-s-TS)。
 蒲贤洁
蒲贤洁
本文通讯作者
重庆大学 副教授
基于生物医学工程研究背景,开展跨学科的自驱动摩擦电传感器与人机交互研究。
▍Email: xjpu@cqu.edu.cn
▍个人主页
phys.cqu.edu.cn/info/1143/4163.htm
 唐乾
唐乾
本文通讯作者
重庆大学 博士研究生
基于摩擦纳米发电机的自供能系统。
▍Email: tangqian@cqu.edu.cn
 胡陈果
胡陈果
本文通讯作者
重庆大学 教授
表面界面物理及相关功能器件设计和应用等方面的研究,特别是在摩擦纳米发电机及自驱动传感器方面做出了许多创新的工作。
▍主要研究成果
共发表SCI论文280多篇,被引用12000多次 (Web of Science),其中,Science Advances (2), Science Robotics (1), Nature Communication (4), Nature Sustainability (1), h-index 58。主持国家自然科学基金6项,省部级基金4项,863子课题1项。申请发明专利29项,获授权23 项,获得省部级自然科学一等奖1项和二等奖2项,获得中国产学研合作创新成果优秀奖1项。
▍Email: hucg@cqu.edu.cn
▍个人主页
phys.cqu.edu.cn/info/1141/3755.htm
 Nano-Micro Letters《纳微快报(英文)》是上海交通大学主办、Springer Nature合作开放获取(open-access)出版的英文学术期刊,主要报道纳米/微米尺度相关的高水平文章(research article, review, communication, commentary, perspective, letter, highlight, news, etc),包括微纳米材料的合成表征与性能及其在能源、催化、环境、传感、吸波、生物医学等领域的应用研究。已被SCI、EI、SCOPUS、DOAJ、CNKI、CSCD、知网、万方、维普等数据库收录。2020 JCR影响因子:12.264。在物理、材料、纳米三个领域均居Q1区(前10%)。2020 CiteScore:12.9,材料学科领域排名第4 (4/120)。中科院期刊分区:材料科学1区TOP期刊。全文免费下载阅读(http://springer.com/40820),欢迎关注和投稿。
E-mail:editor@nmletters.org
Nano-Micro Letters《纳微快报(英文)》是上海交通大学主办、Springer Nature合作开放获取(open-access)出版的英文学术期刊,主要报道纳米/微米尺度相关的高水平文章(research article, review, communication, commentary, perspective, letter, highlight, news, etc),包括微纳米材料的合成表征与性能及其在能源、催化、环境、传感、吸波、生物医学等领域的应用研究。已被SCI、EI、SCOPUS、DOAJ、CNKI、CSCD、知网、万方、维普等数据库收录。2020 JCR影响因子:12.264。在物理、材料、纳米三个领域均居Q1区(前10%)。2020 CiteScore:12.9,材料学科领域排名第4 (4/120)。中科院期刊分区:材料科学1区TOP期刊。全文免费下载阅读(http://springer.com/40820),欢迎关注和投稿。
E-mail:editor@nmletters.org
如果文章对您有帮助,可以与别人分享!:Nano-Micro Letters » 重庆大学胡陈果:基于Halbach Array结构的摩擦电自供能传感器与机械手实时控制
 可降解、超强度、能水洗的导电纤维及其摩擦纳米发电机
可降解、超强度、能水洗的导电纤维及其摩擦纳米发电机 超高密度Co-Fe电磁耦合:增强海绵状碳材料的吸波特性
超高密度Co-Fe电磁耦合:增强海绵状碳材料的吸波特性 捷克Varma教授亮点评述:纳/微球状聚集体在预血管化和再生医学中的应用
捷克Varma教授亮点评述:纳/微球状聚集体在预血管化和再生医学中的应用 打破构建超高亮度倒置有机发光器件的“木桶效应”
打破构建超高亮度倒置有机发光器件的“木桶效应”