Flexible Tactile Electronic Skin with Three-dimensional Force Sensing Capability based on Microstructured CNTs/PDMS Nanocomposite
Nano-Micro Lett. (2019) 11: 57
https://doi.org/10.1007/s40820-019-0288-7
2 基于双面结构的纳米复合材料制备了灵敏度高、一致性好、响应迅速的三维空间力触觉传感器电子皮肤。
3 性能优良的柔性触觉传感器为人体监测和智能机器人抓取应用中的低成本多功能检测提供了一个有前景的策略。
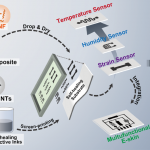
柔性触觉传感器电子皮肤在人体生理监测、机器人操作和人机交互等方面具有广阔的应用前景。一般来说,触觉传感器能够模仿人类对压力的感知并具有检测接触物体形状和滑动情况的能力。与具有高的有效杨氏模量的硅基器件相比,柔性材料由于具有良好的粘附性、拉伸性和柔韧性,更适合应用于仿生触觉。
▌现有的电子皮肤器件在灵敏度、传感范围、可检测三维力方面存在挑战
日常生活中实际的触觉接触力通常是包含侧向力和滑动力的三维力,但是大多数现有的电子皮肤器件只能以正压力的形式检测外力而无法检测切向力,这在一定程度上限制了对接触信息的感知。
▌优化应用场景:研制可检测三维力的电子皮肤
因此,研制一种具有灵敏检测三维接触力能力的柔性触觉传感器电子皮肤会为仿生机器人和多场景应用提供更加丰富的解决策略。
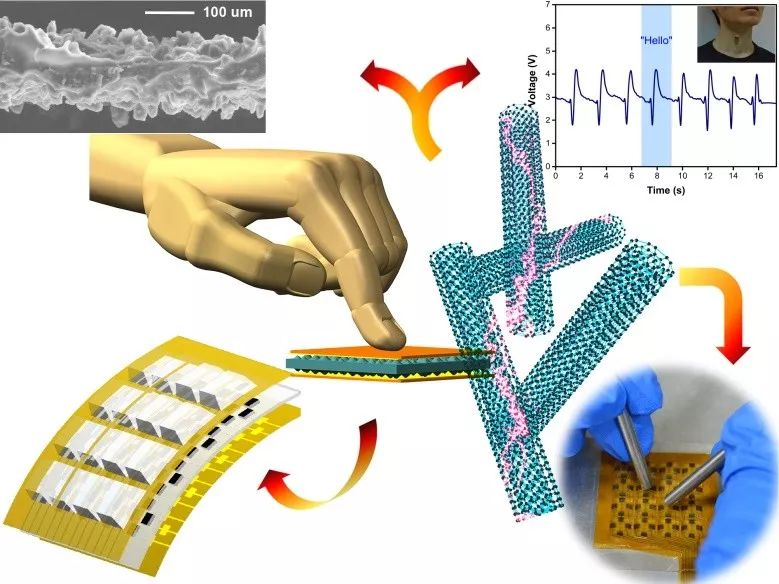
中科院电子所薛宁课题组、孙建海课题组和刘昶课题组等多个课题组合作,研制出基于微结构CNTS/PDMS纳米复合材料的三维力敏感柔性触觉电子皮肤,实现了对人体多种生理信号的检测并且基于阵列形式实现了对多种接触状态的检测和抓取应用。孙旭光博士和孙建海副研究员为论文的共同第一作者。
▌三维MWNTs/PDMS纳米复合材料的制备
采用溶液蒸发法与软光刻相结合的策略,制备出双面粗糙多孔结构的三维MWNTs/PDMS纳米复合材料薄膜,独特的表面结构大大降低了复合材料的有效杨氏模量。
▌三维MWNTs/PDMS纳米复合材料的优势
碳纳米管的超高长径比和轴向导电性可以大大降低其材料消耗,同时保持复合材料中聚合物的力学性能。高机械强度使碳纳米管在反复外力作用下能保持稳定的性能;与纯CNT网络结构复杂易损的制造方法相比,由CNT与聚合物结合形成的纳米复合材料具有更简单、更稳定、成本更低的制造工艺,具有良好的稳定性、导电性和重复性。
纳米复合材料及其器件的制备和制备工艺简单,是大规模、低成本生产电子皮肤的一大优势。由此组装的4×4柔性触觉电子皮肤传感器阵列具有均匀性好、空间分辨率高、对微小接触力响应迅速等特点。
传感器采用双面粗糙结构的纳米复合材料和以PI为基体的柔性印制电路(FPC)电极层,实现了三轴力检测的高灵敏度和与曲面的相容性。
▌传感器的应用性能测试
最后对传感器在特定应用中的性能进行了系统的测试,基于压阻纳米复合材料的触觉传感器还被应用于测量人体腕部脉搏、手指弯曲、肢体运动和机械手抓取物体,反映出其在人体监测和机器人应用中的潜力。
▌结论与展望
本文提出的柔性触觉传感器电子皮肤在响应时间和灵敏度等方面表现出优良的综合性能,能够有效地检测出表面物体的滑动方向以及滑动速度。
我们期望本文的系统设计能够为轻柔触摸测量、人体监测、生物医学和集成机器人应用提供潜在的技术方案。
基于纳米复合材料薄膜的电子皮肤器件
SEM图像显示粗糙的结构不规则地分布在纳米复合材料的表面上,在整个上下表面上具有良好的一致性。激光扫描共聚焦显微镜测量的纳米复合材料表面高度分布数据和高度概率密度分布如图S2、S3所示。
结果表明,粗糙表面结构高度的概率密度分布近似符合高斯分布,平均值μ为39.15 μm,标准差σ为5.21 μm。
随着压力的增加,压阻复合材料的应变变大,有效杨氏模量变大。同时,多壁-碳纳米管网络互连形成的导电通道数量也在增加,使得器件的灵敏度降低。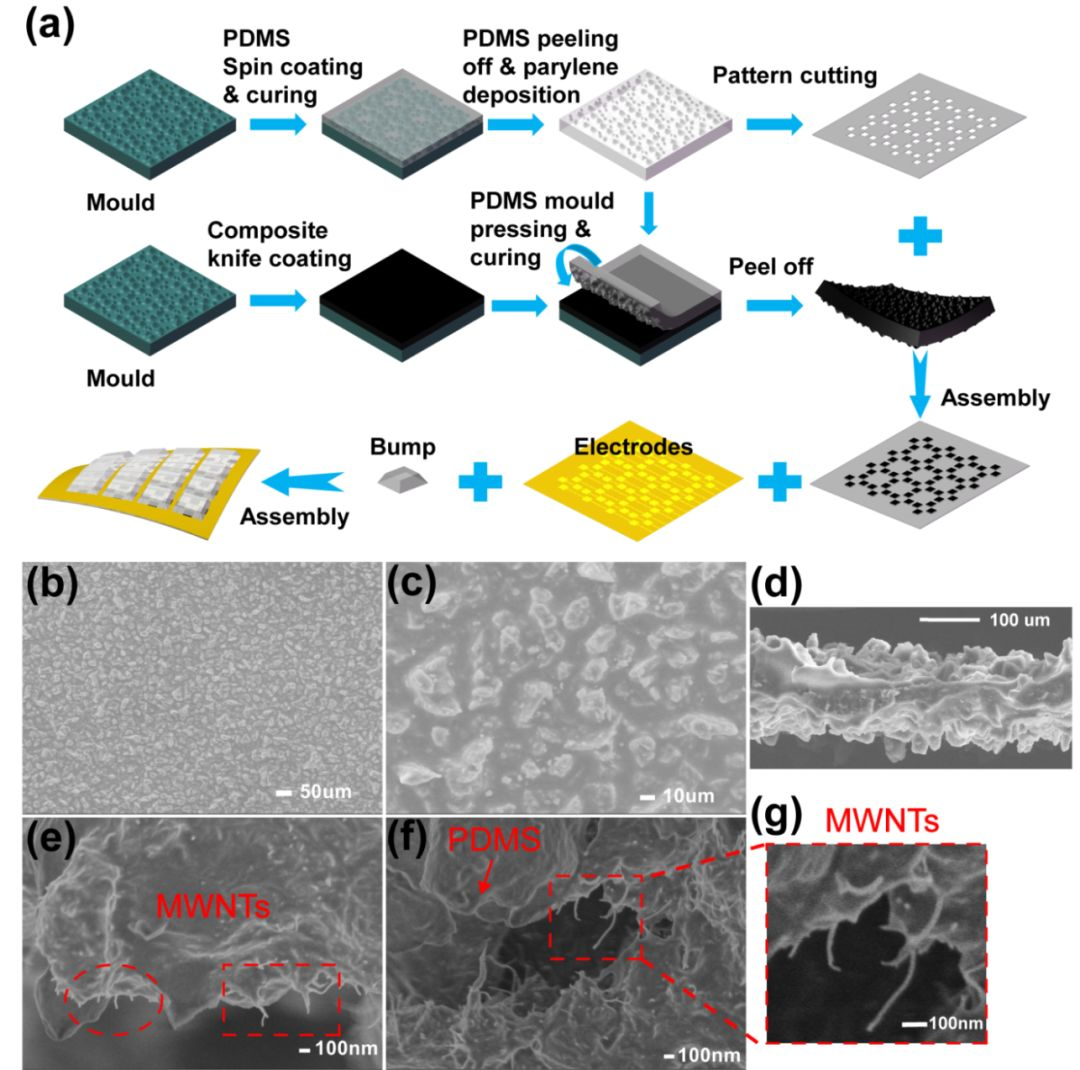
图2 (a) 柔性触觉传感器阵列的制作流程;(b, c) 纳米复合材料在不同放大倍数下的表面结构俯视图;(d) 具有双粗糙表面的纳米复合薄膜的侧视图;(e, f) 纳米复合材料中多孔结构的高倍扫描电镜图像;(g) 单个碳纳米管的放大图。
👇
基于电子皮肤的动态信号检测
采用与传感器阵列相同的结构和工艺流程制备了尺寸为4 mm×8 mm的单传感器并提供5V电压,对人体不同的肢体动作检测,如图3所示。
在脉搏波形中可以清楚地识别出周期中的两个峰值和冲击峰P和重搏波峰D,可用于辅助诊断诸如胰腺炎和十二指肠球部溃疡等疾病。这意味着潜在的生物医学、人体监测和疾病诊断方面方便灵活和无侵入性的应用。
此外单传感器能够用于检测人说话时喉咙肌肉的运动,如图3d-f所示,传感器输出信号具有明显的周期性和一致性,该器件为利用机器学习方法监测和识别人声提供了良好的依据,显示出实际应用的价值。
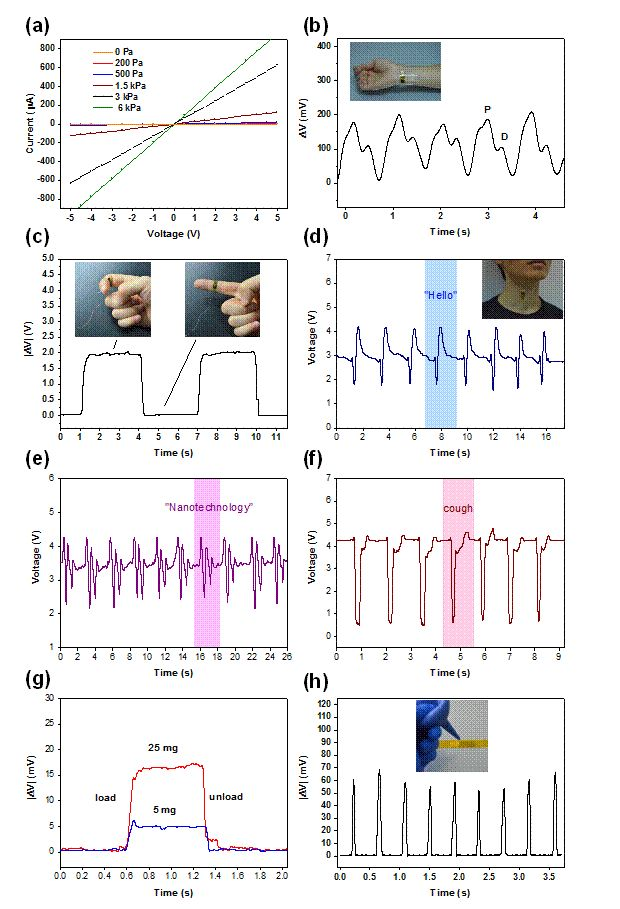
图3. (a) 在不同压力下,传感器从-5V到5V的I-V曲线;(b) 检测人体手腕脉冲;(c) 检测手指弯曲;(d-f) 检测不同语音和咳嗽信号;(g) 检测微小压力25mg和5mg;(h) 局部气流检测。
👇
触觉传感器的压阻性能和应用
对传感器阵列进行压阻测量,图4a显示了在大范围的正向压力下一个敏感单元表现出的明显两个阶段的电阻响应。
灵敏度的变化特点使传感器在小压力下实现高灵敏度,在高压下保持大的测量范围而不饱和,适合机器人和人机交互的多场合应用。
图4b显示了一个凸起下方四个单元的电阻响应和灵敏度,不同单元间的偏差小于12%。考虑到敏感单元的对称分布和相同结构,通过相应单元的电阻差值可以得到不同平面上空间力的幅值和角度。
通过与最近的电子皮肤传感器比较,显示了3D触觉传感器在响应时间和灵敏度等方面的出色综合性能。
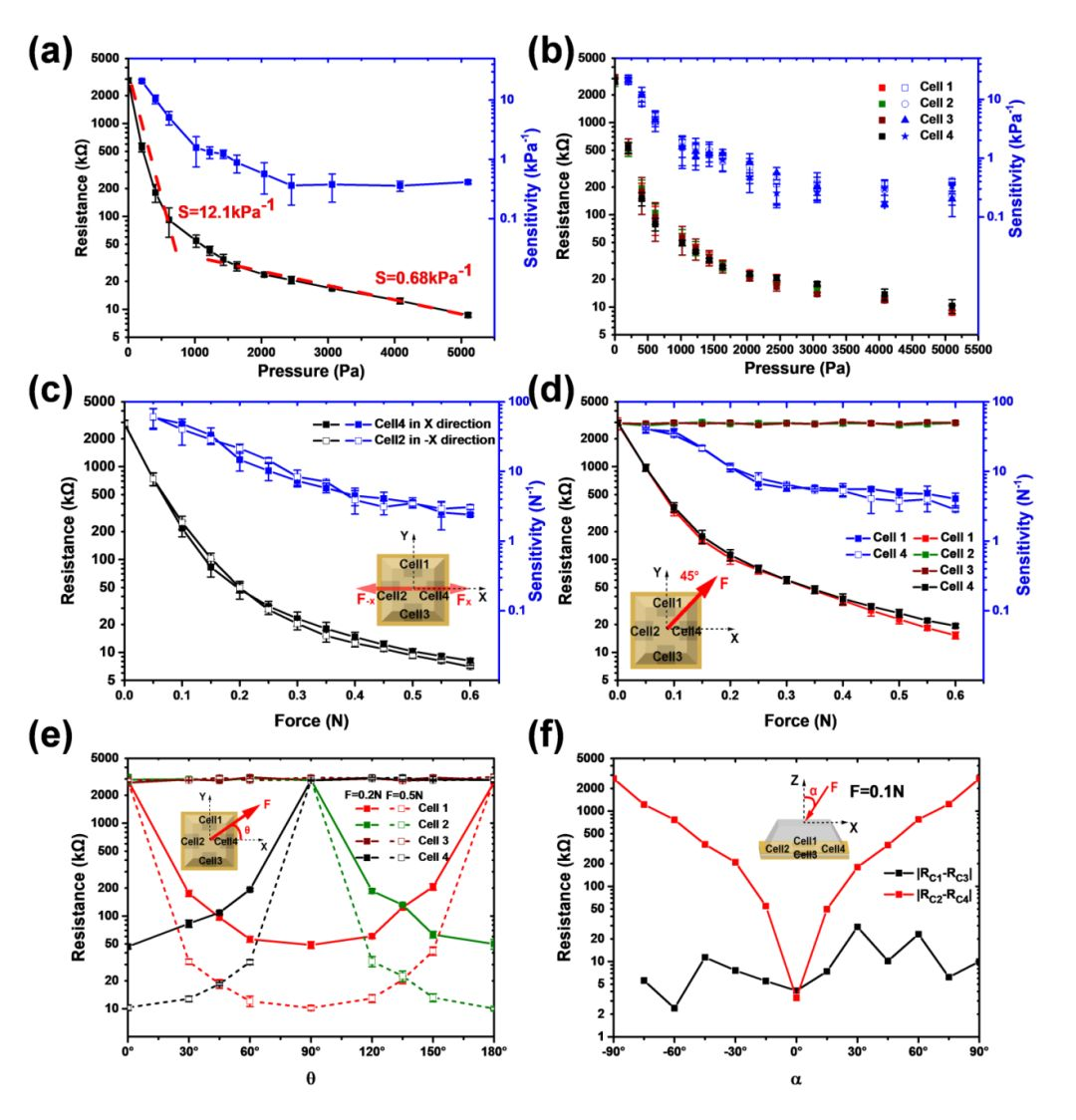
图4. (a) 在正压力下触觉传感器的电阻响应和灵敏度;(b, c) 单个元件中不同单元的电阻响应和灵敏度;(d) 45°切向力作用下的响应曲线;(e) 单个元件对XOY平面中不同角度及大小切向力(0°≤θ≤180°)的电阻响应;(f) 相应敏感单元对XOZ平面中不同角度(-90°≤α≤90°)空间力的电阻响应差值。

研究员/博士生导师/中科院百人计划
中国科学院电子学研究所
长期从事柔性MEMS器件和系统的开发,主要研究方向为光学生物传感器芯片,微流控芯片,多模态集成柔性传感器,以及生物医疗微型器件的生物相容封装等。
▌研究成果
发表生物医疗微型器件方向SCI文章40余篇,并有20余项发明专利。Micromachines特刊编委,多个MEMS领域顶级期刊的审稿人,在多个MEMS领域会议如IEEE Sensors, IEEE EMBC,IEEE INEC做特邀报告。
E-mail: xuening@mail.ie.ac.cn
“可穿戴”电子器件 · 往期回顾 👇
3 “高颜值”可穿戴超级电容器:改性聚氨酯人造革电解质提高可穿戴性
E-mail:editorial_office@nmletters.org
Tel:86-21-34207624
如果文章对您有帮助,可以与别人分享!:Nano-Micro Letters » 神奇的3D触觉“电子皮肤”!人体监测“无侵入”,智能机器人“可感知”
 自修复多功能电子皮肤:清洁环保制备及人体信号的智能手机处理
自修复多功能电子皮肤:清洁环保制备及人体信号的智能手机处理 电子皮肤大汇总!基于石墨烯的触觉传感器
电子皮肤大汇总!基于石墨烯的触觉传感器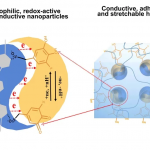 仿贻贝策略:亲水性纳米导电聚合水凝胶的制备
仿贻贝策略:亲水性纳米导电聚合水凝胶的制备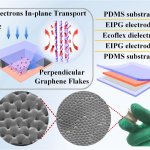 柔性电容式触觉传感器:垂直石墨烯多孔碳膜的微纳加工及应用
柔性电容式触觉传感器:垂直石墨烯多孔碳膜的微纳加工及应用