研究背景
在科技飞速发展的当下,机器人技术取得了令人瞩目的进步。如今的机器人不仅能够与生物体或精细物体进行自然流畅的互动,还能展现出丰富多样、可变形的运动模式,甚至能够在复杂陌生的环境中自如导航。其中,软体机器人无需线缆束缚、行动不受限制,可对多种外部刺激,比如温度、光、化学反应,以及电场和磁场等做出反应。在这些外部刺激中,磁场诱导驱动优势显著,它能让软体机器人在封闭空间,像人体内部环境中畅行无阻,还不会产生任何有害影响或反应。随着先进操作系统的不断发展,人们对磁场的相位、频率和幅度能够实现轻松且精确的控制,推动了磁性软体机器人在设计和制造方面取得重大进展,使得这类机器人能够实现爬行、滚动、跳跃、旋转和游泳等多样化的运动。然而,磁性软体机器人的运作目前仍局限于简单的运动和驱动方式,这严重制约了它们在更广泛领域执行复杂任务的能力。尽管通过集成感知环境和热刺激的功能模块,有望实现感知、检测或主动刺激等更多功能,但刚性/大型模块与软体机器人之间存在的机械不匹配问题,导致在实际应用中往往需要频繁更换模块,同时还面临着驱动方面的诸多限制,阻碍了其进一步发展。在这种情况下,带有集成柔性电子设备的磁性软体机器人脱颖而出,能够通过满足未满足的需求来增强和扩展功能,包括环境检测、电/热/化学驱动以及通过无线通信进行远程控制和交互。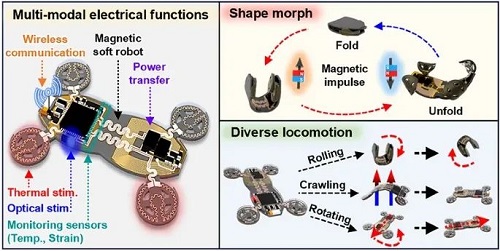
本文亮点
1. 提出了一种柔软、不受束缚的电子机器人,集成了磁响应复合材料,可实现可逆编程和各种运动和形状。
2. 所设计的软/柔性电子系统与磁性软体机器人的无缝集成保证了多模态电气功能的稳定和准确执行,同时保持了其机械运动的完整性。
3. 证明了不受束缚的集成磁力软体机器人的可行性,包括稳定的运行、适应性以及在不同条件下执行复杂任务的能力。
内容简介
在许多传统机械机器人难以胜任的领域,软体机器人展现了巨大的发展潜力。宾州州立大学程寰宇&高丽大学Suk-Won Hwang等展示了一个极具创新性的可变形、可重新配置的机器人平台。该平台由磁响应软复合材料基质与可变形的多功能电子设备集成构建而成,其在低温下发生相变的磁性化合物可以很容易地实现可逆磁化并传导各种运动和形状变化。采用机械动力学设计的薄而灵活的电子系统不会干扰软体电子机器人的运动,并且无线电路、传感器和设备的性能不受各种活动的影响。人工轨道中的导航和电子运作演示突出了集成软体机器人在按需、环境响应运动/变形以及光电检测和刺激方面的潜力。随着小型化复杂系统的进一步改进,该机器人未来有望在生物医学等领域发挥重要作用,实现原位监测与治疗。
图文导读
I 远程操作的铁磁软体机器人系统
图1a展示了一个软体、无约束机器人的示意图,该机器人具有执行多种运动模式和电子功能的能力。该平台的关键方面包括:(1)具有无线电源的多模态功能——监测温度、应变等物理参数,将数据传输到智能设备,并根据需要提供热/光刺激;(2)通过外加磁场编程的铁磁软矩阵磁域实现形状变形;(3)无约束,多功能运动-通过-爬行,通过滚动和旋转在不同的地形上行走,包括凹凸不平的地面和水。图1b显示了集成磁性软体机器人的分解视图,该机器人由以下部分组成:(底部)由软硅橡胶和涂有钕铁硼微粒子(NdFeB,~1 μm)的混合物制成的机动车辆式铁磁软矩阵,用于驱动和改变形状为各种模式;(中下)柔性铜基射频(RF)功率传输线圈层(~3 μm厚);谐振频率,6.78 MHz)、介电聚酰亚胺(PI,~5 μm厚)和Cu互连(~3 μm厚);(中上)商用电子组件;(顶部)软密封剂(Ecoflex 0030, ~ 100 μm厚),保护整个电子元件免受干湿环境和各种变形的影响。图1d中的功能框图显示了系统的整体流程,通过无线操作调节传感器/执行器,将模拟数据转换为数字数据,并通过蓝牙与外部设备进行远程通信。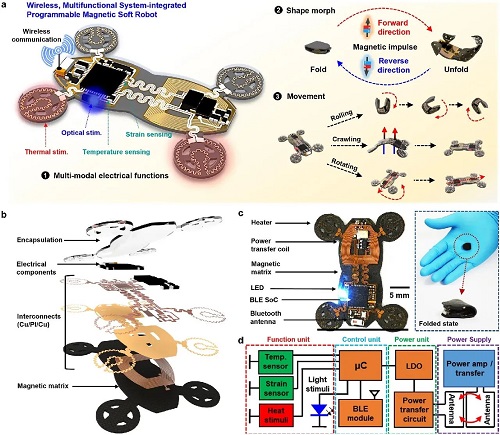
图1集成磁性软体机器人系统的材料、设计、组件。(a)集成磁性软体机器人的示意图;(b)集成磁性软体机器人系统的分解视图;(c)集成磁性软体机器人的代表性示例照片;(d)整体电子方框图,具有无线供电单元、电源管理、控制等功能。
II 磁性软体复合材料的制备、表征与调控
图2主要围绕磁性软复合材料展开研究,从制备的 WcMPs 出发,通过比例优化制备高机械刚性、磁性响应的磁性软复合材料。图2a展示了可编程蜡包覆磁性颗粒,平均尺寸约10 μA,这些颗粒由大豆蜡作为相变材料和NdFeB作为硬磁物质组成,在接近蜡的转变温度(约45°C)的外部场下,磁取向可以被调节。通过可重新编程的磁化过程,展示了磁性软复合材料多种形状变化的能力,如形成字母形状,且多次循环后编程过程的重复性和稳定性良好。通过外部磁场操纵形状恢复过程的能力,证明交叉和汽车模型的复合材料能在10秒内恢复原状,表明在复杂三维变形中具有形状恢复的可能性。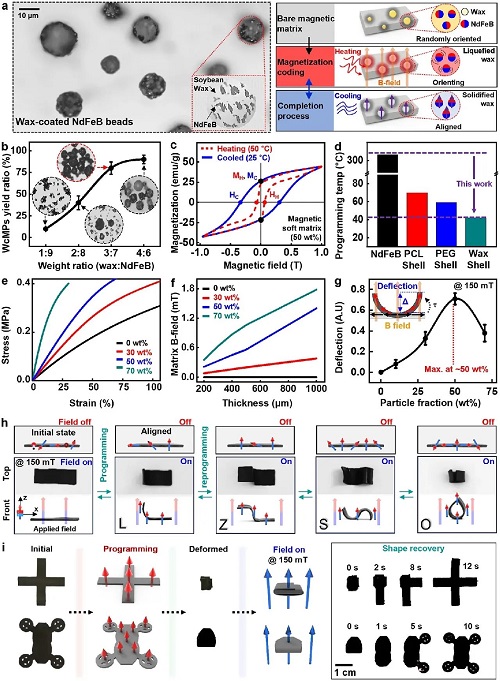
图2 磁性软复合材料的表征和驱动性能。(a)大豆蜡包覆的钕铁硼微粒(WcMPs)的光学图像;(b)根据大豆蜡和NdFeB颗粒的重量比以及插图中获得的WcMPs的图像,评估WcMPs产量;(c)软聚合物复合材料的磁性能测量;(d)已报道的钕铁硼和聚合物壳层(聚己内酯(PCL)、聚乙二醇(PEG)和蜡壳)之间的磁化温度比较;(e)不同重量浓度WcMPs的铁磁软弹性体在单轴应变下的机械行为;(f)不同厚度下WcMPs重量浓度的铁磁软弹性体的磁场场强度变化;(g)磁性软弹性体(~500 μm)两个自由端的挠度作为驱动性能,取决于颗粒体积分数;(h)磁化基质通过外部磁场(150 mT)的可逆、多样化转变;(i)通过静态磁场(150 mT)调节复杂变形中磁化软基体的各种不同形状的能力。
III 集成磁软体机器人在多种运动模式下的实验和理论评估
图3聚焦于集成磁性软体机器人的电子集成与运动研究,从多方面展示其特性与性能。通过调节磁场强度可控制爬行行为的弯曲半径和步长;改变磁场强度和频率能控制爬行速度和顺序滚动;施加特定磁场,机器人可完成向上弯曲、折叠后的向前滚动,且滚动速度与磁场旋转频率相关;利用磁场还能控制机器人的旋转运动以改变方向,通过在机器人角落设置轮子,可进一步操控导航路径,同时通过重复轨迹跟踪测试验证了运动操控的可靠性。展示了集成软体机器人的多种运动模式下的优异的控制能力。
利用模拟不同弯曲半径下有无电子电路及不同电路布局的软体机器人应变分布,结果表明无电子电路的软体机器人最大主弯曲应变比有电子电路的高约20%;相比集中式电路,分散式电路在相同弯曲半径下弯曲应变低约150%,突出了分散式电路设计的优势。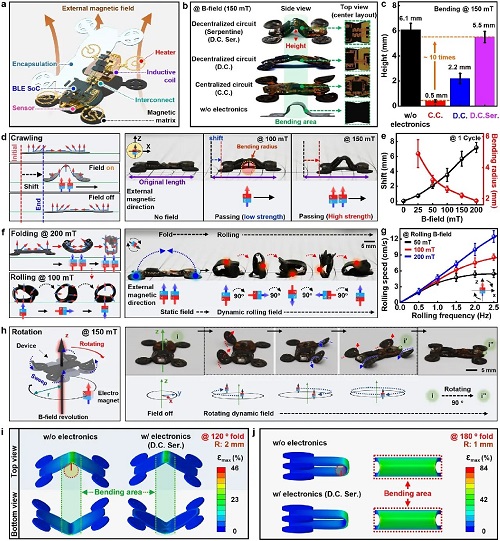
图3 磁性软体机器人上的电子设备集成及其运动研究。(a)电子集成、可变形磁性机器人的示意图;(b)、(c)当施加150 mT磁场时,磁力机器人弯曲区域相对高度差的演示;(d)集成磁性软体机器人响应外部磁场源的爬行运动的基本程序;(e)由磁场强度驱动的行程距离和弯曲半径的测量变化;(f)通过不同模式的磁场控制集成磁性软体机器人的折叠和滚动运动;(g)机器人滚动速度的测量值与施加的磁场滚动频率的函数关系;(h)软体机器人的旋转运动,通过由不同磁场模式调制的单个轮子改变或导航方向;(i)机器人系统以120°折叠,曲率半径为2 mm的应变分布;(j)机器人系统以180°折叠,曲率半径为1 mm的应变分布。
IV 磁力作用下集成软体机器人的机械稳定性和器件电学特性的实验和理论评估
图 4 主要研究集成磁性软体机器人在磁场作用下的机电稳定性,涵盖应力分布、电气性能变化等方面。通过模拟磁场下电子元件应力分布,展示了机器人在爬行(120°弯曲,曲率半径 2mm)和滚动(180°折叠,曲率半径 1mm)状态时,电子元件的应力分布情况,发现应力集中在蛇形结构中心内侧。
通过实验测试多种电气部件在磁场下的性能,证明了电子器件的稳定性:互连电阻在2mm半径下重复弯曲1000次变化可忽略不计,展现出良好的耐久性;功率传输线圈的光谱在弯曲时虽有变化,但可通过优化发射线圈设计改善;无线功率接收线圈在磁场干扰下,散射参数、开路电压和产生电压等性能有所增强;温度、应变传感器和电容在磁场下变化极小;微加热器在磁场下加热行为有效;LED、p-n 二极管、MOSFET、陀螺仪以及片上系统等在磁场下性能稳定。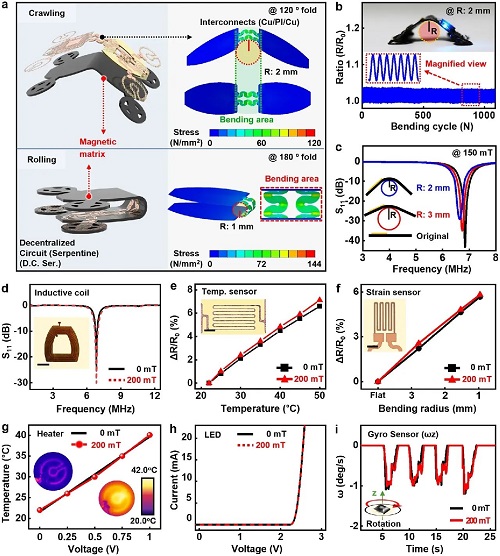
图4 集成磁软体机器人在外加磁场下的电气和机械稳定性。(a)机器人系统在爬行和滚动状态下的电子元件应力分布;(b)在半径为~2 mm的1000次的反复弯曲测试;(c)无线电力传输线圈在不同弯曲半径(平面至 3 mm)下的散射光谱(S11);(d)外围磁场对铜感应线圈S11的影响(谐振频率:~6.8 MHz);应变传感器电阻在有无磁场时随(e)温度和(f)弯曲半径的变化率;;(g)微加热器在施加磁场存在下的加热性能;(h)磁场下 μ-LED 的 I-V 特性比较;;(i)磁场对陀螺仪传感器性能的影响。
V 集成磁性软体机器人的多模态运动和远程操控
图5通过在人工轨道上的实验,展示集成磁性软体机器人在复杂环境中的多模态运动和远程操作能力,验证其实际应用潜力。利用人工轨道模拟复杂环境,集成磁性软体机器人能感知温度变化,在低温区变形折叠并滚过窄S形滑道,遇到高温的老虎形状障碍物时绕行,同时可实时检测周围环境参数。集成磁性软体机器人能恢复到预编程形状,穿越曲折排列的圆柱柱体,爬上有坡度的桥,证明了其形状恢复与复杂地形穿越的能力。集成磁性软体机器人具有红外感应与狭窄空间通行能力,当检测到红外发射时,可折叠穿越狭窄洞穴,并记录相应光电流。到达目标区域后,机器人可进行远程光学和热操作,且经多次变形和运动后仍能稳定运行,在潮湿条件下也能正常工作。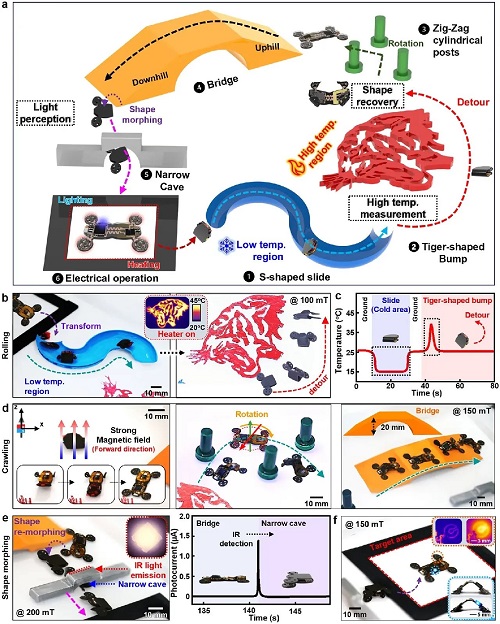
图5 集成磁性软体机器人的多模态运动和电气功能演示。(a)磁性软体机器人绕过人工障碍物的示意图;(b)通过对温度的感知,使机器人变为折叠状态并绕过障碍物;折叠后的机器人向前滚动,穿过S形滑轨(宽度 30 mm),并绕道加热、不均匀的老虎图案(温度:45 °C)。(c)实时记录运动过程中的温度变化;(d)磁性软体机器人形状恢复到预编程的形式,并穿过圆柱形柱子,爬过上坡和下坡的桥梁;(e)磁性软体机器人当检测到红外光照射时,转换回折叠状态并穿过一个狭窄的洞穴(20 mm× 15 mm),并记录光电流响应图。(f)磁性软体机器人到达目标区域以及远程光学和热成像。
VI 总结
本文从概念提出、材料合成、电路设计和应用演示四个维度,全方位地报道了一种柔软且不受束缚的集成磁性软体机器人。该机器人能够掌控多种运动、移动以及驱动模式,还能实现电学、热学以及光电功能。首先,通过对大豆蜡进行了磁性纳米颗粒的工程改造,得到了一种高机械刚性、具有磁性响应的磁性软复合材料。集成的无线电路和设备组件采用了精巧复杂的设计布局,不会对机器人的运动或其他动作产生干扰,且能够通过测量或驱动各种参数,以无线方式提供实时信息。集成磁性软体机器人具备穿越各类障碍物的能力,还能进行无线电气和光学操作。这一成果为增强或拓展现有软体机器人的功能开辟了新路径,同时也为利用无毒材料元件创建环境监测器或医疗植入物应用提供了可能,并且实现了整体系统小型化的需求。
作者简介


关于我们

Nano-Micro Letters《纳微快报(英文)》是上海交通大学主办、在Springer Nature开放获取(open-access)出版的学术期刊,主要报道纳米/微米尺度相关的高水平文章(research article, review, communication, perspective, highlight, etc),包括微纳米材料与结构的合成表征与性能及其在能源、催化、环境、传感、电磁波吸收与屏蔽、生物医学等领域的应用研究。已被SCI、EI、PubMed、SCOPUS等数据库收录,2023 IF=31.6,学科排名Q1区前3%,中科院期刊分区1区TOP期刊。多次荣获“中国最具国际影响力学术期刊”、“中国高校杰出科技期刊”、“上海市精品科技期刊”等荣誉,2021年荣获“中国出版政府奖期刊奖提名奖”。欢迎关注和投稿。
Web: https://springer.com/40820
E-mail: editor@nmlett.org
Tel: 021-34207624
如果文章对您有帮助,可以与别人分享!:Nano-Micro Letters » 宾州州立大学程寰宇&高丽大学Suk-Won Hwang等:无线、多功能系统集成可编程软体机器人
 韩国科研院Jinwoo Lee等:为高性能纤维状储能器件设计氧化还原聚合物电解质
韩国科研院Jinwoo Lee等:为高性能纤维状储能器件设计氧化还原聚合物电解质 中科院兰州化物所毕迎普等:高活性BiVO₄光阳极耦合高选择性Co-N₅阴极实现高效CO₂还原
中科院兰州化物所毕迎普等:高活性BiVO₄光阳极耦合高选择性Co-N₅阴极实现高效CO₂还原 仿生离子传感器综述:将自然机制转化为传感技术
仿生离子传感器综述:将自然机制转化为传感技术 武大侯佑民、陈重学&华科王康丽等:吸附调控界面稳定性实现高度稳定且安全的 4.6 V 钴酸锂正极
武大侯佑民、陈重学&华科王康丽等:吸附调控界面稳定性实现高度稳定且安全的 4.6 V 钴酸锂正极