研究背景
仿生触觉传感器件和电子皮肤是未来智能假肢和智能机器人的必要组件。现有主动式触觉传感器件(如电阻式、电容式、晶体管式)能够检测静态和动态触觉刺激,但即使在伺服状态下也需要源源不断的能量消耗,导致单个传感单元的功耗就高达微瓦甚至毫瓦级别,限制了其应用。相比之下,无源式触觉传感器件(如压电式、摩擦电式、离子电式)无需外部能量供应,在受到机械刺激时可以自行产生信号输出,因此功耗极低;然而,上述被动式触觉传感器件通常只对动态或瞬态的机械刺激产生响应,而无法监测静态和缓慢变化的机械刺激,限制了其触觉感知功能。因此,设计和构建既能检测静态刺激又能检测动态刺激的全被动式触觉传感器件及电子皮肤,是仿生触觉传感领域需要解决的问题之一。
Bioinspired Passive Tactile Sensors Enabled by Reversible Polarization of Conjugated Polymers
Feng He, Sitong Chen, Ruili Zhou, Hanyu Diao, Yangyang Han*, and Xiaodong Wu*
Nano-Micro Letters (2025)17: 16
https://doi.org/10.1007/s40820-024-01532-z
本文亮点
1. 通过模拟天然感知细胞的响应行为提出了一种全有机无源式仿生触觉传感器件及电子皮肤。
2. 首次利用共轭聚合物独特的可逆极化特性实现复杂触觉信息的被动式感知。
3. 利用上述触觉传感器,在机器学习算法辅助下实现了高准确度的表面纹理检测、材料属性识别和形状轮廓感知。
内容简介
四川大学吴晓东等人通过利用共轭聚合物独特的可逆极化特性,模拟了天然感知细胞的极化过程,提出了一种新型仿生被动式触觉传感器件,可用于静态和动态刺激的无源式检测。该触觉传感器件具有灵敏度高(773 mV·N⁻¹)、功耗超低(nW)和生物友好等优势。基于该新型触觉传感器件及电子皮肤,在人工智能算法的辅助下,成功实现了单点触觉感知(如表面纹理识别、材料属性感知等)和二维触觉感知(如物体形状和轮廓识别),识别准确率高达97.4%。该种仿生触觉传感器的设计和构建方法为机器人触觉皮肤、人工智能假肢等领域提供了新的参考和借鉴。
图文导读
I 仿生被动式触觉感知的设计概念
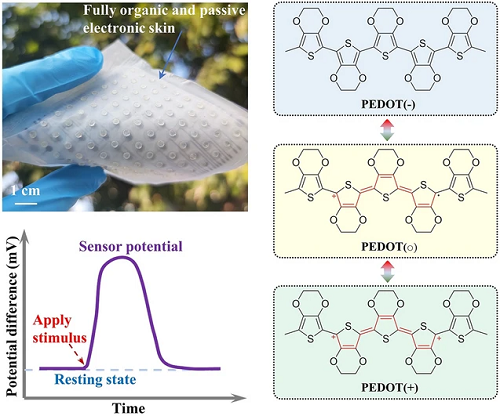
天然皮肤中存在多种感知细胞,这些感知细胞通过跨膜转运特定离子实现从非极化到极化状态的转变,最终产生电位差信号。当受到外部刺激(如压力)时,细胞膜离子通道开启,导致离子跨膜流动,引起膜内外电位差的显著变化。为了模拟这种天然细胞的传感行为,本文选择共轭聚合物材料(如PEDOT:PSS、聚苯胺或聚吡咯),首先将其极化为两种相反的状态(掺杂态和去掺杂态),以产生电位差信号;然后使用具有表面微结构的固态离子电解质来模拟离子通道,成功将外部压力刺激编码成电位差变化。
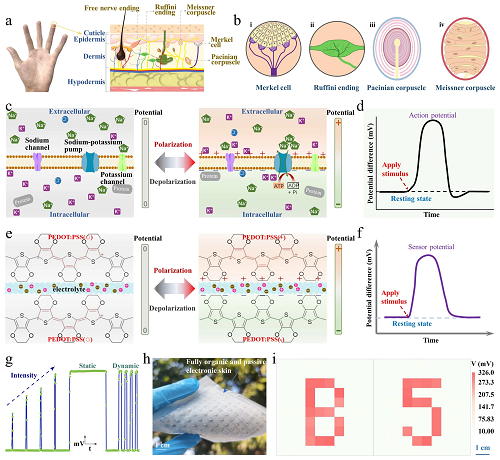
图1. 基于共轭聚合物可逆极化的仿生被动式触觉感知。(a, b)天然皮肤中的机械刺激感受器示意图,包括Merkel细胞(ⅰ)、Ruffini末梢(ⅱ)、Pacinian小体(ⅲ)、Meissner小体(ⅳ)。(c)感知细胞的极化过程示意图,通过极化可在细胞膜内外形成电位差。(d)机械刺激下细胞膜电位差的变化过程。(e) PEDOT:PSS的极化过程示意图,分为正性极化PEDOT:PSS(+)和负性极化PEDOT:PSS(-),二者之间可以产生电位差。(f)所构建的触觉传感器在机械刺激下的响应行为。(g)触觉传感器在受到不同大小静态和动态刺激时的响应信号。(h, i)基于该方法构建的全有机被动式触觉电子皮肤及其空间轮廓检测能力。
II PEDOT:PSS极化过程的表征
PEDOT:PSS 是一种具有离子和电子导电特性的共轭聚合物。它由活性的PEDOT骨架和掺杂剂PSS侧链组成,可以通过正极化或负极化调节其掺杂状态。通过Vis-NIR光谱可以观察到PEDOT:PSS在不同极化状态下的光谱变化,正极化会导致极化子氧化成双极化子,负极化则会将部分双极化子还原成极化子。极化过程还会影响PEDOT:PSS的颜色、电阻和电位。上述结果成功证明了PEDOT:PSS的双向极化特性。重要的是,PEDOT:PSS的极化过程是高度可逆的,可以通过去极化过程恢复其原有特性,且极化和去极化过程具有良好的可重复性。
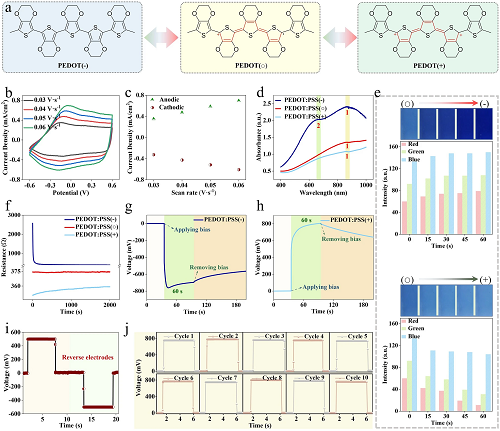
图2. PEDOT:PSS的极化过程表征。(a) PEDOT在PEDOT:PSS(○)、PEDOT:PSS(+)和PEDOT:PSS(-)状态下的分子结构。(b)不同扫描速率下PEDOT:PSS的循环伏安曲线。(c)不同扫描速率下从CV曲线提取的峰值电流。(d) PEDOT:PSS(○)、PEDOT:PSS(+)和PEDOT:PSS(-)的可见光-近红外光谱。(e)从PEDOT:PSS(○)到PEDOT:PSS(-)(上)和PEDOT:PSS(+)(下)的颜色变化照片。(f)PEDOT:PSS(○)、PEDOT:PSS(+)和PEDOT:PSS(-)的电阻变化过程。(g, h)偏压下PEDOT:PSS(-) (g)和PEDOT:PSS(+) (h)相对于PEDOT:PSS(○)的电位差相对变化。(i) 正向极化和逆向极化下的PEDOT:PSS(-)和PEDOT:PSS(+)电位差变化。(j) PEDOT:PSS(-)和PEDOT:PSS(+)在重复极化、去极化和复极化过程中的电位差变化。
III 被动式触觉传感器的性能评估
基于上述机制构建的全有机被动式触觉传感器能够将外界机械刺激编码为电位差信号输出,并产生连续且平滑的信号相应过程。通过调整离子电解质中甘油的含量,可以调节传感器的灵敏度和检测限,实现对不同力值的可靠识别。该触觉传感器具有快速的响应和恢复速度,并且功耗极低(小于1纳瓦),非常适合于无需外部电源的自供能系统。相比于传统传感器,该触觉传感器能够持续监测静态和动态的机械刺激,并且在传感器经过5000次循环测试后仍显示出良好的相应行为。此外,该触觉传感器完全由生物相容和可降解的材料构成,具有出色的生物安全性和环境友好性。
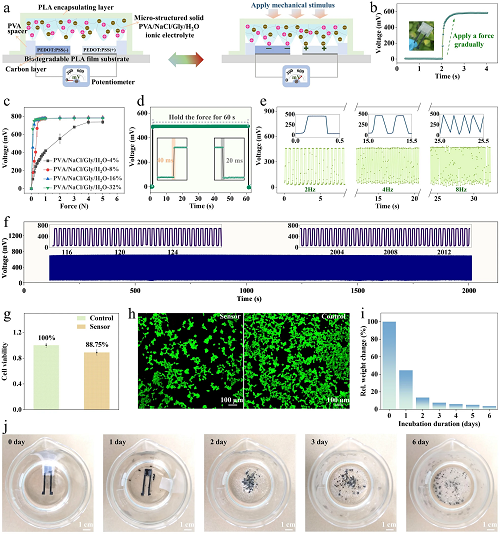
图3. 仿生被动式触觉传感器的结构和性能。(a)受力前后触觉传感器的结构变化示意图。(b)逐渐施加力时传感器的电位差变化。(c)基于不同甘油(Gly)含量PVA/NaCl/Gly/H₂O电解质的传感器响应行为。(d)触觉传感器的响应与恢复速率,以及在持续力(60 s)下的传感器信号输出,表明传感器具有良好的静态刺激检测能力。(e)传感器在不同频率下(分别为2、4和8 Hz)的电位差变化,表明传感器具有低频动态刺激监测能力。(f) 5000次力加载和卸载测试。(g)触觉传感器在细胞培养液中浸泡24小时后的细胞活力测试。(i)触觉传感器在0.5 M氢氧化钠溶液中浸泡6天后过程中的相对质量变化。(j)照片显示触觉传感器的逐步降解过程。
IV 单点触觉感知与识别
上述被动式触觉传感器模仿了天然皮肤中机械感受器的功能,能够感知和区分物体的表面纹理和材料属性。作为验证,该触觉传感器被集成到假手的指尖部位,通过机械滑动的方式检测不同物体表面的粗糙度和纹理,然后通过短时傅里叶变换对传感器的响应信号进行频谱分析,可以精确地区分和识别物体表面的微观纹理特征。此外,该触觉传感器还具备识别多种日常物品材料属性的功能。由于触觉传感器响应信号特征比较复杂,超出了人眼的观测和辨识能力,因此本文采用了基于二维卷积神经网络的机器学习算法来解析和分类这些负责信号,从而实现对不同物体材料属性的高效识别。
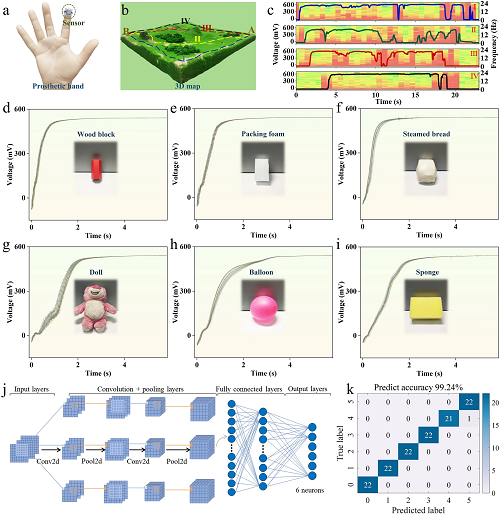
图4. 基于单点触觉传感器的表面纹理识别和材料属性识别。(a)触觉传感器集成在假手指尖的照片展示。(b)在三维地图模型上从a点滑动到b点的四条路径(Ⅰ, Ⅱ, Ⅲ和Ⅳ)。(c)集成触觉传感器的指尖沿Ⅰ, Ⅱ, Ⅲ和Ⅳ路径滑动时的信号变化以及相关的STFT光谱。(d-i)集成触觉传感器的指尖在重复触摸木块(d)、泡沫(e)、馒头(f)、布偶(g)、气球(h)、海绵(i)等不同物体时记录的电位差信号变化。(j)基于2D卷积神经网络(2D CNN)的机器学习框架示意图。(k)不同材质物体的预测混淆矩阵。
V 二维触觉感知和识别
在本项研究中,还开发了一种全有机、被动式、单电极模式的柔性电子皮肤,用以模拟人类皮肤对物体形状和轮廓的识别功能。该电子皮肤由100个传感单元构成,共有104个电极,这样的设计简化了电子皮肤的电路布线和制造过程。这种电子皮肤通过测量传感电极与参考电极之间的电位差来检测外力分布。由于在测量过程中电路通过的电流几乎为零,有效降低了不同传感单元之间的干扰和串扰问题。使用3D打印模具作为待检测物体,验证了该电子皮肤能够精确识别字母和数字轮廓。此外,借助主成分分析(PCA)和支持向量机(SVM)构建的机器学习框架,可使该电子皮肤对不同形状物体的识别准确率达到97.4%,显示出在智能机器人和人工假肢等领域中的应用潜力。
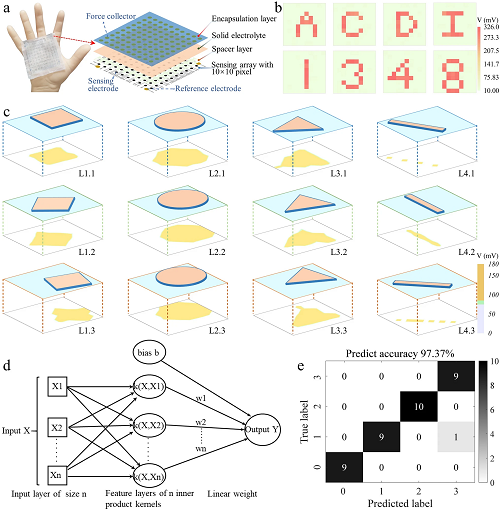
图5. 用于二维形状和轮廓识别的触觉感知电子皮肤。(a) 触觉感知电子皮肤的组成和布局。(b)将不同形状的3D打印模具压在电子皮肤上时,所有传感像素点相对于参考电极的电位差输出的空间映射。(c)将不同形状物体(立方体、圆柱体、三角棱柱和棒状物体)以不同的位置和角度放置到电子皮肤上时所重建的彩色映射图像。(d)基于支持向量机(SVM)的机器学习框架示意图。(e)二维形状和轮廓识别结果和混淆矩阵。
VI 总结
本文提出了一种基于共轭聚合物(包括PEDOT:PSS,聚苯胺和聚吡咯)可逆极化的全有机和被动式触觉传感器件及电子皮肤。本文对PEDOT:PSS的可逆极化过程和极化机理进行了全面的研究和分析。利用PEDOT:PSS的可逆极化特性,将外界触觉刺激编码为电位差输出,最终建立了一种新的仿生触觉感知机制。由此构建的被动式触觉传感器具有超低能耗(nW)、高灵敏度(773 mV·N⁻¹)、快速响应/恢复时间(≈40 ms和≈20 ms)、良好的重读再现性(超过5000次循环),最重要的是,同时具有监测静态和低频动态刺激的能力。该触觉传感器在表面纹理感知和材料特性感知方面具有很好的应用前景;此外,基于该机理开发了一种全有机、单电极模式的触觉感知电子皮肤,在机器学习算法的辅助下实现了高精度(97.37%)的二维形状和轮廓识别。本研究为模拟天然触觉感知功能提供了新的感知机制和技术途径,有望促进人工假肢和智能机器人的发展。
作者简介

本文通讯作者
围绕”柔性智能感知技术”,长期致力于柔性人工电子皮肤、仿生触觉感知、可穿戴健康监测与人机交互、仿生电子器件及智能系统等交叉领域的研究。
关于我们

Nano-Micro Letters《纳微快报(英文)》是上海交通大学主办、在Springer Nature开放获取(open-access)出版的学术期刊,主要报道纳米/微米尺度相关的高水平文章(research article, review, communication, perspective, highlight, etc),包括微纳米材料与结构的合成表征与性能及其在能源、催化、环境、传感、电磁波吸收与屏蔽、生物医学等领域的应用研究。已被SCI、EI、PubMed、SCOPUS等数据库收录,2023 JCR IF=31.6,学科排名Q1区前3%,中国科学院期刊分区1区期刊。多次荣获“中国最具国际影响力学术期刊”、“中国高校杰出科技期刊”、“上海市精品科技期刊”等荣誉,2021年荣获“中国出版政府奖期刊奖提名奖”。欢迎关注和投稿。
Web: https://springer.com/40820
E-mail: editor@nmlett.org
Tel: 021-34207624
如果文章对您有帮助,可以与别人分享!:Nano-Micro Letters » 川大吴晓东等:用共轭聚合物可逆极化特性构建仿生被动式触觉传感器
 武大侯佑民、陈重学&华科王康丽等:吸附调控界面稳定性实现高度稳定且安全的 4.6 V 钴酸锂正极
武大侯佑民、陈重学&华科王康丽等:吸附调控界面稳定性实现高度稳定且安全的 4.6 V 钴酸锂正极 唐本忠院士团队:生物酶处理超级木材集成AIE非织造布用于高效蒸发高浓度氨氮废水
唐本忠院士团队:生物酶处理超级木材集成AIE非织造布用于高效蒸发高浓度氨氮废水
 NML卷期 | 2025年第4期免费下载
NML卷期 | 2025年第4期免费下载