研究背景
大自然为软机器人的发展提供了大量灵感。许多生物,如人类的舌头、水母的触手和含羞草的叶子,不仅可以在大范围内灵活形变,而且具有自我感知能力。为了模拟这些自然系统,研究人员通过结合软致动器和柔性传感器来开发仿生软机器人。然而,一个普遍的限制是大多数软致动器虽然能够形成复杂的形状,但缺乏感知外部刺激和监测自身运动的能力,而直接嵌入传感器容易导致软机器人设计和制造的复杂性增加,在环境交互中的应用中受到阻碍。因此,开发一体化仿生多功能自感知软机器人具有重要的意义。
Bioinspired Multifunctional Self-Sensing Actuated Gradient Hydrogel for Soft-Hard Robot Remote Interaction
He Liu, Haoxiang Chu, Hailiang Yuan, Deliang Li, Weisi Deng, Zhiwei Fu, Ruonan Liu, Yiying Liu, Yixuan Han, Yanpeng Wang, Yue Zhao, Xiaoyu Cui *, Ye Tian *
Nano-Micro Letters (2024)16: 69
https://doi.org/10.1007/s40820-023-01287-z
本文亮点
1. 通过二氧化钼纳米片沉淀的亲水性方法制备了生物启发的自感知驱动的梯度水凝胶。
2. 自感知驱动的梯度水凝胶结合了超快热响应致动、优异的光热效率和高灵敏度传感性。
3. 构建了首个近红外刺激-自感知水凝胶致动器-蓝牙交互机械手的远程控制系统。
内容简介
东北大学崔笑宇和田野等提出了一种简单而有效的亲水性差异方法,制备了一种受生物启发的多功能一体化自感知驱动梯度水凝胶,它具有超快速致动和高灵敏度传感的能力,进而实现了软硬机器人之间的远程交互。梯度网络结构的形成是通过引入MoO₂纳米片快速沉淀进而在水凝胶两侧产生了聚合物链的亲水性差异。这种独特的方法赋予水凝胶超快的热响应致动(21°/s)和良好的光热效率(3.7 °C /s, 808 nm NIR)。同时,利用与Ca2⁺的局部交联赋予水凝胶可编程驱动和信息显示能力。此外,该水凝胶还表现出高传感灵敏度(在600%的宽应变范围内应变系数为3.94)、快速响应时间(140 ms)和循环稳定性。利用这些优异特性,将水凝胶融入软机器人(软抓手、人工虹膜和仿生水母)和可穿戴电子设备中(精确检测人体运动和生理信号)。通过结合物联网技术,量化了自感知水凝胶致动器的实时电阻和驱动角度关系,并构建了近红外刺激-自感知水凝胶致动器-蓝牙交互机械手的远程控制系统,实现了软硬机器人之间的远程交互。本研究提出的多功能自感知驱动梯度水凝胶为先进体感材料、自反馈智能软机器人和人机交互柔性电子提供了新的见解。
图文导读
I PSM水凝胶的合成与表征
图1a表明PSM梯度水凝胶是通过SA、MoO₂和热敏PNIPAM水凝胶原位共聚制备的。MoO₂在重力作用下迅速沉降到混合溶液的底部,由于MoO₂的疏水性,亲水性的 NIPAM 单体更容易被吸引到顶部,从而导致丰富的 PNIPAM 相聚合。因此,水凝胶沿重力方向获得了梯度结构。图1b所示的SEM图像证实了PSM水凝胶独特的梯度网络结构。图1c统计了水凝胶网络尺寸从区域I的5.71 μm增加到区域III的21.94 μm。图1d研究了PSM水凝胶的机械性能。表明SA和MoO₂的引入改善了水凝胶的拉伸应变和应力性能,其中水凝胶的最佳断裂应变为666%,最佳断裂应力为23.9 kPa。
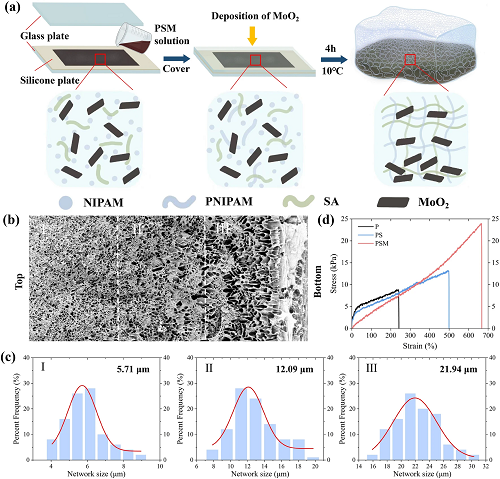
图1. PSM水凝胶的合成和表征。a PSM水凝胶的合成、聚合分散和梯度网络结构示意图。b 具有大范围梯度结构的PSM水凝胶的SEM图像。c b中三个不同位置的PSM水凝胶的网络尺寸统计。d P、PS和PSM水凝胶的应力-应变曲线。
II PSM 水凝胶的热响应驱动
图2a表示CaCl₂ 浸泡的PSM水凝胶可以在50 °C水中以21° s⁻1的速度向顶侧弯曲成圆形(336°)。图2b统计了这种驱动性能超过了大多数报道的热响应水凝胶致动器。图2c证实了驱动速度的提高可归因于CaCl₂浸泡导致水凝胶的去溶胀速率显着增加。图2d的DSC测量表明PSM水凝胶具有较低的体积相变温度(VPTT),并且CaCl₂的添加进一步降低了水凝胶的VPTT,从而导致更快的响应速率。图2e表明水凝胶CaCl₂浸泡150 s的弯曲速度最快。图2f表明水凝胶中MoO₂含量显着影响弯曲速度,其中PSM0.6水凝胶具有最快的弯曲速度,过量的MoO₂阻碍了水凝胶底部的网络,影响水分子的排出并导致弯曲速度下降。图2g表示在50 ℃水中,弯曲速度随着水凝胶厚度的增加而降低。图2h利用PSM水凝胶的超快热响应驱动特性实现了仿生四臂抓取器。
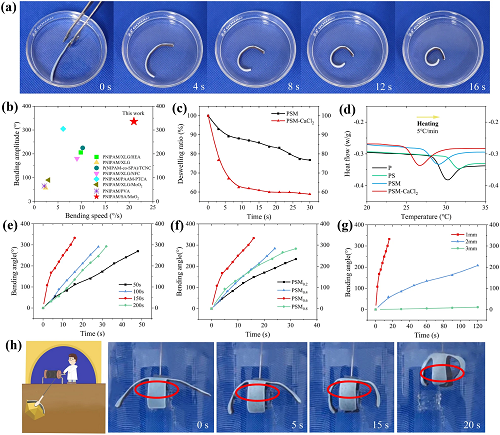
图2. PSM 水凝胶的热响应驱动。a厚度为1 mm的PSM水凝胶在50 °C水中的弯曲行为。 b不同水凝胶在外部刺激下的弯曲速度和弯曲幅度的比较。c PSM和PSM-CaCl₂水凝胶在50 ℃水中的去溶胀曲线。d P、PS、PSM和PSM-CaCl₂水凝胶的DSC曲线。e CaCl₂浸泡时间对50 ℃水中弯曲响应的影响。f水凝胶中MoO₂含量对50 ℃水中弯曲响应的影响。g水凝胶厚度对50 ℃水中弯曲响应的影响。h PSM水凝胶抓取器从50 ℃水中抓取金属片的过程。
III PSM 水凝胶的光响应驱动
图3a表明由于MoO₂的近红外光热效应,PSM水凝胶的温度会随着近红外光的照射而升高。图3b表示MoO₂含量的提高可以改善光热转化。PSM0.6和PSM0.8具有相似的温升速率,在近红外光照射(808 nm,1 W cm⁻2)的10 s内达到近2.2 ℃ s⁻1。图3c表示PSM水凝胶的温升速率随着激光功率密度的增加而增加,在近红外光照射(808 nm,2 W cm⁻2)的10秒内达到近3.7 °C s⁻1。利用这些光响应特性,我们使用 PSM 水凝胶成功制造了仿生人工虹膜。如图3d所示,虹膜在近红外光照射下逐渐张开,露出花朵的背景图案,关闭近红外光后虹膜可以关闭。如图3e所示,受水母游动启发,还开发了一种光响应软机器人。将PSM梯度水凝胶放置在水面上,通过循环打开和关闭近红外光,PSM水凝胶会朝光的方向游动。

图3. PSM水凝胶的光响应驱动。a PSM0.6水凝胶在1 W cm⁻2的808nm近红外光照射下的温度变化。b 具有不同MoO₂含量的PSM水凝胶在近红外光照射(808 nm,1 W cm⁻2)下的温度响应曲线。c 不同功率密度的PSM0.6水凝胶在808nm激光下的温度响应曲线。d 人工虹膜的示意图和照片。e 仿生水母在近红外开关下游动的示意图和照片。
IV PSM水凝胶的可编程变形和信息显示
图4a和b所示,通过用Ca2⁺进行图案化以局部交联来进一步制造形状可编程的 PSM水凝胶,变形角度可以通过调整Ca2⁺的涂层角度轻松控制。图4c所示通过在顶面和底面同时图案化Ca2⁺,获得了更复杂的变形,例如字符“Ω”。图4d表示PSM水凝胶能够进行复杂的3D折叠运动,根据立方体展开图涂覆Ca2⁺,水凝胶自动折叠形成封闭的立方体。图4e所示水凝胶可用于显示和隐藏信息。编码信息通过涂覆Ca2⁺来写入。PSM水凝胶在热刺激下从亲水性变为疏水性,外观从透明变为不透明,显示出“I ❤ U”的信息。降低温度后,PSM水凝胶恢复原来的透明外观,有效隐藏信息。同时,EDTA溶液和Ca2⁺之间的配位反应能够实现信息擦除,例如将字母“U”有效擦除。

图4. PSM水凝胶的可编程变形和信息显示。a 左斜浸涂Ca2⁺的示意图和照片。b 右斜浸涂Ca2⁺示意图及照片。c 正向和反向浸涂Ca2⁺的示意图和照片。d 自组装折叠立方体示意图及照片。e 在PSM水凝胶中显示和隐藏信息。
V PSM水凝胶的传感性能
图5a表示当水凝胶从原始状态拉伸到50%、100%、150%、200%、250%和300%时,PSM水凝胶的RRC逐渐增加,显示出没有滞后的实时变化。图5b显示PSM水凝胶的响应因子 (GF) 在600%的宽工作应变范围内为3.94,而且还具有良好的稳定性和高度线性(R2 = 0.97),超越了许多以前的报道(图5c)。图5d通过加载和卸载小拉伸应变来评估PSM水凝胶的响应速度,并证明了快速响应时间(140 毫秒)和恢复时间(230 毫秒)。图5e显示了PSM水凝胶在50个循环加载-卸载100%应变下的RRC,证明了其良好的耐久性。图5f显示PSM水凝胶的光热响应传感特性,其电阻可以通过切换近红外光快速稳定地改变。因此,PSM水凝胶独特的传感特性和高灵敏度使我们能够准确检测各种人体信号。图5g所示,随着手指角度的变化,粘附的水凝胶快速检测到手指弯曲的连续变化。PSM水凝胶还可用于人体生理信号检测。图5h所示通过将PSM水凝胶粘附到喉咙上,可以检测到发出“Hydrogel actuator”时喉咙微弱振动产生的RRC。图5i所示,PSM水凝胶可以通过使用数字心电图采集模块来检测连续的心电图信号。
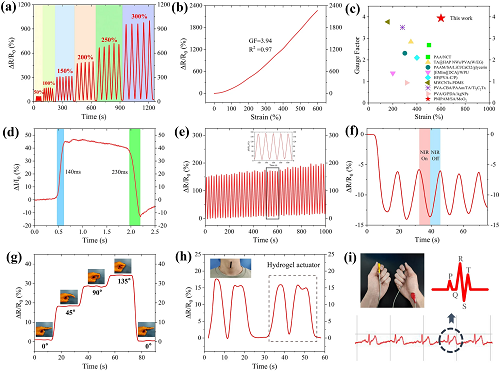
图5. PSM水凝胶的传感性能。a PSM水凝胶的RRC在拉伸范围为50%至300%。b PSM水凝胶在拉伸应变下的RRC。c 水凝胶传感器在600%应变范围内的拉伸应变响应系数比较。d PSM水凝胶在拉伸-松弛过程中的瞬时响应/恢复时间。e PSM水凝胶在100%应变下 50 个循环的RRC。f 通过定期打开和关闭 NIR 辐射(5个周期)来改变 PSM 水凝胶的电阻。g 来自不同角度(0、45°、90°、135°)的手指运动的PSM水凝胶的RRC。h 粘附在喉咙上PSM水凝胶的RRC测试。i PSM水凝胶检测心电信号。
VI 自感知PSM水凝胶与IoT交互系统
图6a所示,基于PSM水凝胶的超快驱动和高灵敏度的开发了一种自感知仿生人工舌头,它可以在近红外刺激下感知触摸勺子。图6b和c表示了,在没有近红外光照射的情况下,人造舌头保持向下的位置,PSM水凝胶的电阻没有变化。当受到近红外光照射时,人造舌头开始迅速向上弯曲,PSM水凝胶的电阻急剧下降(图6b,红线)。10秒后,人工舌头逐渐接触勺子,PSM水凝胶的阻力缓慢下降(图6b,黑线)。最后,关闭近红外辐射后,人造舌头软化回来,PSM水凝胶的电阻逐渐恢复到其初始值(图6b,蓝线)。证明了PSM水凝胶的触摸自感知能力。

图6. 自感知仿生人工舌头。a 示意图,b 接触过程的RRC,c 人工舌头接触小勺子响应近红外刺激的完整过程。
图7a概述了基于物联网的软-硬机器人的远程交互系统。整个系统包括4个主要部分:(1)PSM水凝胶的自感知近红外响应刺激。(2) 信号采集与传输系统,包括信号采集模块和蓝牙传输模块。(3) 信号接收及控制系统,由蓝牙接收模块和驱动控制模块组成。(4) 机械手控制终端。图7b进一步量化分析了PSM水凝胶的自感知特性,将收集的水凝胶电阻变化数据和弯曲角度数据进行非线性拟合。图7c和d显示PSM水凝胶精确驱动机器人手的中指和无名指弯曲并抓住小猪娃娃。图7e和f记录了5个PSM水凝胶的电阻变化以及5个机器人手指相应的角度变化。由此,我们实现了一种基于物联网的远程交互系统:近红外刺激—自感知水凝胶—蓝牙交互机械手。
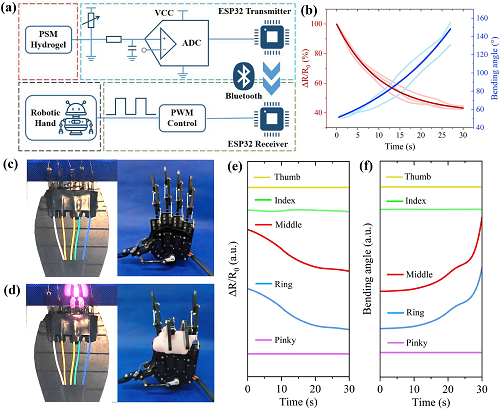
图7. 软硬机器人远程交互系统。a 示意图。b PSM水凝胶的电阻和弯曲角度的拟合曲线。 c 自感知水凝胶在近红外刺激前。d 刺激后远程控制机械手抓住猪娃娃。e 5个PSM水凝胶在近红外刺激下的实时电阻变化。f 远程交互时5个机械手指的实时弯曲角度变化。
VII 总结
我们基于新颖的亲水性策略制造了一种仿生自感知驱动梯度水凝胶,用于软-硬机器人之间的远程交互。水凝胶表现出超快的驱动特性和光热效率。展现了软机器人的应用潜力,包括抓取器、人造虹膜和仿生水母。同时,可以使用Ca2⁺ 对水凝胶进行编程来实现复杂驱动和信息显示。此外,水凝胶还具有良好的传感性,包括高拉伸响应灵敏度、快速响应时间和可重复稳定性。水凝胶可以被用作人体运动和生理信号检测。结合驱动和传感特性,制备了一种自感知仿生舌头。特别是进一步与物联网结合,量化水凝胶的运动轨迹,实现了远程控制系统:近红外刺激响应—智能自感知软机器人—蓝牙交互机械手。综上所述,本工作提出了一种新颖且高效的方法来制备高性能自感知驱动梯度水凝胶,为新一代智能交互式体感软材料的开发铺平了道路。
作者简介

本文通讯作者
从事计算机视觉、人工智能算法、嵌入式系统、FPGA等方向教学研究工作。
▍Email:cuixy@bmie.neu.edu.cn

本文通讯作者
从事微流控、柔性传感、软材料和医学检测方向的研究工作。
▍Email:tianye@bmie.neu.edu.cn
关于我们

Nano-Micro Letters《纳微快报(英文)》是上海交通大学主办、在Springer Nature开放获取(open-access)出版的学术期刊,主要报道纳米/微米尺度相关的高水平文章(research article, review, communication, perspective, highlight, etc),包括微纳米材料与结构的合成表征与性能及其在能源、催化、环境、传感、电磁波吸收与屏蔽、生物医学等领域的应用研究。已被SCI、EI、PubMed、SCOPUS等数据库收录,2022JCR影响因子为 26.6,学科排名Q1区前5%,中科院期刊分区1区TOP期刊。多次荣获“中国最具国际影响力学术期刊”、“中国高校杰出科技期刊”、“上海市精品科技期刊”等荣誉,2021年荣获“中国出版政府奖期刊奖提名奖”。欢迎关注和投稿。
Web: https://springer.com/40820
E-mail: editor@nmlett.org
Tel: 021-34207624
如果文章对您有帮助,可以与别人分享!:Nano-Micro Letters » NML2024.4封面文章:仿生多功能自感知驱动的梯度水凝胶用于软硬机器人的远程交互
 山东大学李阳团队:成功模拟生物联想学习行为(如手写体识别)的光电子突触器件,助力神经形态计算
山东大学李阳团队:成功模拟生物联想学习行为(如手写体识别)的光电子突触器件,助力神经形态计算 华科赵龙教授等:环境耐受性双网络离子导电复合水凝胶材料用于高性能柔性电子器件
华科赵龙教授等:环境耐受性双网络离子导电复合水凝胶材料用于高性能柔性电子器件