研究背景
康复训练是一种有效降低痉挛导致功能障碍风险的策略。然而,为患者实现可视化康复训练在临床上仍具有挑战性。在此,我们提出了视觉康复训练系统,其中包括具有亲肤性和大矩阵特征的离子电子元织物,以及用于人体肌肉张力分布的高分辨率图像模块。由于元织物界面的动态连接和解离,该织物具有出色的触觉传感特性,如宽触觉传感范围(0~300 kPa)和高分辨率触觉感知(50 Pa 或 0.058%)。同时,由于毛细管效应的不同,元织物具有 “一石三鸟 “的特性(干爽穿着体验、超长工作时间和冷却感应)。在此基础上,这种织物可与服装和先进的数据分析系统相结合,组装出一系列大型矩阵结构(40×40,1600 个传感单元)的训练装置。值得注意的是,元织物的离子动力学可调性和高分辨率成像模块的可编程性使得这种可视化训练策略可扩展到各种常见疾病的监测。因此,我们相信我们的研究克服了标准痉挛康复训练设备在视觉显示方面的限制,为未来的智能医疗铺平了道路。

Skin-Friendly Large Matrix Iontronic Sensing Meta-Fabric for Spasticity Visualization and Rehabilitation Training via Piezo-Ionic Dynamics
Ruidong Xu, Tong Xu, Minghua She, Xinran Ji, Ganghua Li, Shijin Zhang, Xinwei Zhang, Hong Liu*, Bin Sun*, Guozhen Shen*, Mingwei Tian*
Nano-Micro Letters (2025)17: 90
https://doi.org/10.1007/s40820-024-01566-3
本文亮点
1. 所报道的离子电子元面料具有“一石三鸟”的特性,突破了传统薄膜材料(PDMS)无法兼顾舒适性和耐用性的瓶颈。
2. 元面料可与服装和先进的数据分析系统集成,制造出一系列大矩阵结构(>40×40,1600个传感单元)的康复训练设备,克服了传统离子电子设备(<10×10,100个传感单元)矩阵集成度低的瓶颈。
内容简介
青岛大学田明伟/孙彬/刘红、北京理工大学沈国震等人提出了基于亲肤大矩阵离子电子元织物和训练有素的数据分析模块的痉挛可视化康复训练系统。在高达 270 kPa 的宽压力范围内,元织物表现出卓越的触觉灵敏度和高传感分辨率(50 Pa 或 0.058%)。特别是,它具有 “一石三鸟 “的特性(分别是干爽的佩戴体验、较长的工作时间和冷却感应)。这些优点主要归功于通过精确设计具有亲水-疏水双层结构的织物基材而产生的毛细管差效应。此外,为了证明我们的元织物在医疗领域的应用潜力,我们制作了可视化握力训练手套和运动平衡训练地毯。得益于元面料的优势,这些设备可以在精确康复训练过程中实时显示人体运动产生的精确压力分布。我们相信,我们的设备能为痉挛患者提供更加智能化、个性化和舒适的医疗保健体验,有望成为下一代痉挛闭环康复训练辅助技术的理想候选产品。
图文导读
I 触觉传感运动接口的构建及结构展示
图1a,b所示的是受鳄鱼皮肤表面感觉器官独特的凸起结构启发,我们在离子电子元织物中引入了穹顶形生物感知结构。图1c所示的是穹顶状 PAAM-LiCl 离子水凝胶(底部直径:10 毫米,高度:1.5 毫米)的实物图。图1d所示的是元织物的三层结构示意图。图1e所示的是离电式元织物的实物展示,证明该种制备方法非常简单直接,而且可以大规模制造,显示了实际应用的潜力。图1f,g所示的是作为概念验证,我们提出了两个具体场景(智能病房和智能康复室)来展示我们工作的实用性,包括握力训练手套(每只手有 30 个传感单元)和运动平衡训练地毯(> 40×40,1600 个传感单元),实现了对人体肌肉张力信息的高分辨率实时分析。
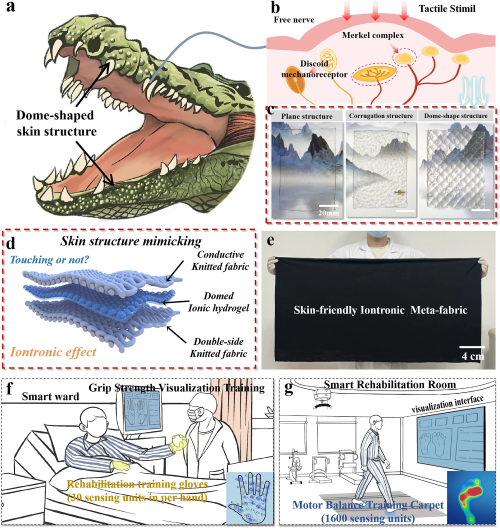
图1. 触觉传感运动接口的构建。a,b鳄鱼皮肤表面穹隆状结构的示意图。c结构化离子水凝胶的形态及其微观结构。d,e触觉传感运动接口的结构示意图与实物图。f,g痉挛康复训练手套与地毯的概念。
II 可编程元织物高灵敏触觉传感机理
图2a,b 所示的是带有圆顶形离子水凝胶的元织物在压力下的电容响应。结果表明带有平面感应层的元织物的触觉传感性能较差,最大灵敏度仅为 0.24 kPa⁻¹。而带有穹顶状感应层的元织物表现出优异的传感性能,最大灵敏度可达3.91kPa⁻¹。
图2c所示的是元织物触觉传感机理,究其原因是穹顶形结构的制造策略增强了上层改性针织物与中间活性层之间的离子电子效应。图2d所示的是通过有限元分析(FEA)对具有三种活性层结构的元织物进行了分析,进一步论证仿生策略所制备的元织物在宽压力范围内具有显著灵敏度的内在机理。图2e所示的是与其他相关工作相比,我们的元织物在触觉感应灵敏度和工作范围方面更具优势。图2f所示的是元织物优异的传感稳定性,在10000次动态循环压缩过程中,电容信号没有出现明显的漂移或波动。
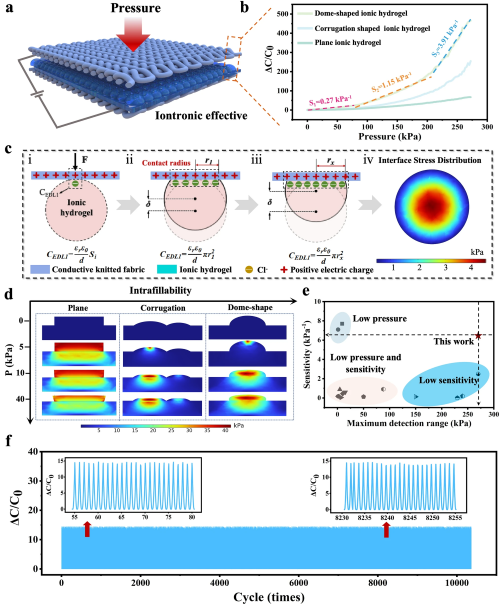
图2. 可编程元织物的设计原理和传感机制。a 在高达 270 kPa 的压力范围内离子电子元织物电容的变化。b,c 施压前后元织物的传感机制。d 在高达 40 kPa 的压力下不同结构的模拟结果的应力分布:平面、波纹和圆顶形。e 与之前报道的触觉传感器的灵敏度和最大检测范围进行比较。f 元织物的机械稳定性。
III 离子电子元织物的高触觉传感分辨率图3a所示的是由于采用了圆顶结构,我们的元织物具有理想触觉传感器的两个基本特征:出色的稳定性和高传感分辨率。图3b-g所示的是高压负载下(250 kPa)元织物可以精确识别到0.4 kPa的低压。图3h,i所示的是将元织物组装成L型和方形,可以实现多种远程交互控制。
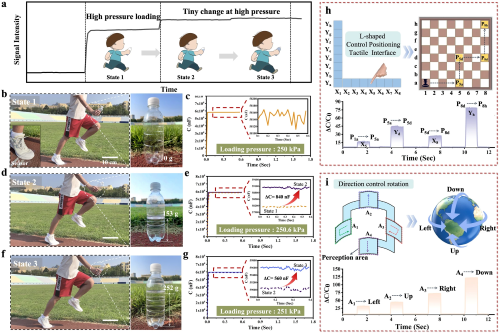
图3. 元织物的高触觉传感分辨率。a 离子电子触觉传感对低压和高压的响应示意图,以及高压下的微压检测。b-g 对触觉传感网络施加的不同微压负荷(600 Pa 和 400 Pa)的检测。
IV 离子电子元织物的亲肤特性
图4a,b所示的是元织物水分输送能力的累积单向输送能力和整体水分管理能力,结果表明我们所制备的双面提花织物具有优异的吸湿和快干性能。图4c,f 所示的是提花织物双面荧光液滴(150 µL)的湿气传输试验,结果表明当液滴滴在亲水面(PBT)上时,它迅速渗透织物并迅速扩散,形成一个大的润湿区域(≈0.5 秒)。相反,当液滴滴落在疏水性一侧(PE/PP)时,会出现缓慢的渗透过程,并在亲水性一侧形成润湿区。图4g所示的是双面提花织物基底可将水分保持在离子水凝胶内,从而延长元织物的工作时间。图4h所示的是元织物封装策略对维持器件稳定性的工作原理。图4i所示的是元织物具有优异凉感的示意图。图4j所示的是元织物具有优异的冷感特性,Q-max值达可达 5.3 W/cm⁻²,比服装的标准凉爽值(0.15 W/cm⁻²)高出近 35 倍,这说明了元织物具有优异的冷感特性。
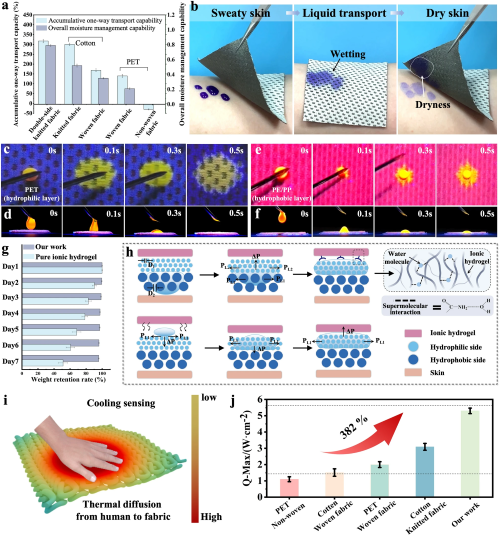
图4. 元织物的穿着舒适性和毛细管效应差异。a 我们的双面提花织物与其他商用织物的吸湿快干性能。c,d 亲水性 PBT 面料(与离子水凝胶接触)和 e,f 疏水性 PP/PE 面料(直接与皮肤接触)的润湿测试(俯视图)和单向液体输送测试(侧视图)。g 我们的元面料与纯离子水凝胶的重量保持率。h 我们的元面料的毛细管效应差异和超分子相互作用机理。i 元面料的冷却感应示意图。J 元纤维的 Q-Max 值。
V 握力可视化康复训练手套
图5a,b所示的是基于握力可视化康复训练系统 该系统包括一双握力训练手套(每只手套有 30 个传感单元)、一个数据采集板模块、数据分析模块和终端显示模块。图5c,d所示的是志愿者戴上训练手套进行连续握力训练测试。在此过程中,利用握力训练的四个特征阶段(分别为放松阶段、接触阶段、抓握阶段和力竭阶段)来展示可视化功能。图5e所示的是测试者手掌压力热图变化趋势。
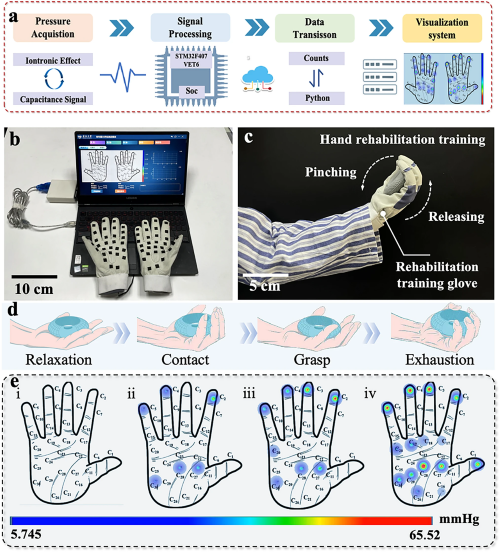
图5. 握力可视化康复训练系统的构建与显示 a 握力可视化康复训练系统的组成:一副握力训练手套、数据分析模块和终端显示模块 b 握力可视化康复训练系统的图像 c 握力测试图像(左手) d,e 握力训练过程中的四个特征阶段示意图和相应的可视化握力热图。
VI 运动平衡可视化康复训练地毯
图6a-c所示的是平衡训练地毯(500 毫米×500 毫米)与基于 Cortex-M4 核心处理器的 40×40 触觉传感阵列,以此实现运动平衡的高分辨率视觉康复训练。图6d所示的是根据足部的物理结构,对足部的三个主要区域(前足、中足和后跟)进行了压力可视化测试和分析。由于元织物的触觉感应分辨率很高,因此可以捕捉到这三个区域的压力分布以及姿势的变化。从热力图中可以看出当志愿者以居中姿势站立时,生物力学特征会导致中足部位的负重减少,而前脚掌和脚跟则是主要的负重区域。图6e所示的是一个完整的步态循环测试,志愿者整个步态行为中的足底压力变化可以通过相应的视觉压力热图反映出来。
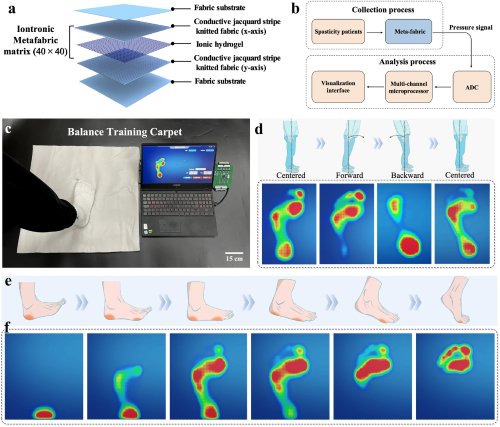
图6. 运动平衡可视化康复训练系统的构建与展示 a 运动平衡地毯结构示意图,包括 40 × 40 离子织物矩阵 b 运动平衡可视化康复训练系统框图 c 运动平衡可视化康复训练地毯图像 d 前倾、居中、后倾三种站立状态下的压力分布热图 e,f 从跟脚到前脚掌着地的完整步态周期的压力分布热图。
VII 总结
受鳄鱼皮肤表面感受器官独特的凸起结构启发,开发出一种具有穹顶状感应层结构的离子电子元织物。通过元织物内部导电织物与中间感应层之间的离电效应,可以使元织物具有优异的触觉分辨率。在此基础上,因此,我们设计了一套多通道数据采集和分析系统,其中包含训练模块(手套和步态监测垫)、数据采集板模块和终端分析显示模块,以实现痉挛患者康复可视化训练。因此,我们相信我们的工作能为未来的智能医疗提供一条新的技术路线。
作者简介

田明伟
本文通讯作者
青岛大学 教授
▍主要研究领域
长期从事电子纺织品与人机交互的应用基础研究,针对电子纺织品连续化构筑难、传感抗干扰性差、穿着舒适性低等技术瓶颈,围绕“纤维基传感-高弹性导线-纺织基构型”开展研究。
▍个人简介
青岛大学纺织服装学院常务副院长,博士生导师,泰山学者青年专家,山东省优青。发表SCI论文110篇,被引4648次,H指数37,ESI高被引论文6篇。申请国家发明专利20项,已授权11项。受邀在中国纺织学术年会、第91届世界纺织大会等会议汇报21次。获山东省科技进步二等奖、中国纺织工业联合会科技进步二等奖、中国纺织工业联合会教学成果三等奖、青岛市技术发明三等奖,指导山东省优秀硕士研究生论文1篇。
▍Email:mwtian@qdu.edu.cn
撰稿:原文作者
编辑:《纳微快报(英文)》编辑部
关于我们

Nano-Micro Letters《纳微快报(英文)》是上海交通大学主办、在Springer Nature开放获取(open-access)出版的学术期刊,主要报道纳米/微米尺度相关的高水平文章(research article, review, communication, perspective, highlight, etc),包括微纳米材料与结构的合成表征与性能及其在能源、催化、环境、传感、电磁波吸收与屏蔽、生物医学等领域的应用研究。已被SCI、EI、PubMed、SCOPUS等数据库收录,2023 JCR IF=31.6,学科排名Q1区前3%,中国科学院期刊分区1区期刊。多次荣获“中国最具国际影响力学术期刊”、“中国高校杰出科技期刊”、“上海市精品科技期刊”等荣誉,2021年荣获“中国出版政府奖期刊奖提名奖”。欢迎关注和投稿。
Web: https://springer.com/40820
E-mail: editor@nmlett.org
Tel: 021-34207624
如果文章对您有帮助,可以与别人分享!:Nano-Micro Letters » 青岛大学田明伟/孙彬、北理沈国震等:亲肤离子电子元织物实现痉挛患者的可视化和康复训练
 山东大学李阳团队:成功模拟生物联想学习行为(如手写体识别)的光电子突触器件,助力神经形态计算
山东大学李阳团队:成功模拟生物联想学习行为(如手写体识别)的光电子突触器件,助力神经形态计算 华科赵龙教授等:环境耐受性双网络离子导电复合水凝胶材料用于高性能柔性电子器件
华科赵龙教授等:环境耐受性双网络离子导电复合水凝胶材料用于高性能柔性电子器件 中山大学杨柏儒/桂许春等:超高品质因数的柔性、透明、导电网格薄膜及其电热和电磁屏蔽特性
中山大学杨柏儒/桂许春等:超高品质因数的柔性、透明、导电网格薄膜及其电热和电磁屏蔽特性