突触器件作为人工传入神经系统的关键部件,能够模拟生物的突触行为,从而引起研究者们的广泛关注。本文提出了一种具有仿生物神经感知行为的柔性摩擦电人工突触(TAS)。TAS通过外部刺激成功地展示了一系列突触行为,如兴奋性突触后电流、成对脉冲易化以及从感觉记忆到短期记忆和长期记忆的分级记忆过程。此外,在弯曲半径为20 mm的应变条件下,突触行为保持稳定,在1000次弯曲循环后,TAS仍然表现出良好的耐久性。最后,通过将力和振动分别作为食物和铃声刺激,成功地模拟了巴甫洛夫条件反射。
A Flexible Tribotronic Artificial Synapse with Bioinspired Neurosensory Behavior
Jianhua Zeng, Junqing Zhao, Tianzhao Bu, Guoxu Liu, Youchao Qi, Han Zhou, Sicheng Dong and Chi Zhang*
Nano-Micro Letters (2023)15: 18
https://doi.org/10.1007/s40820-022-00989-0
本文亮点
1. 提出了一种具有仿生物神经感知行为的柔性摩擦电人工突触(TAS),并建立了一种主动式的交互机制。
2. 通过改变机械输入模式TAS显示出可调谐的突触行为,如兴奋性突触后电流、成对脉冲易化以及从感觉记忆到短期记忆和长期记忆的分级记忆过程。
3. TAS具有优异的机械柔性,即使在弯曲半径为20 mm的应变条件下弯曲循环1000次后,仍然表现出稳定的突触功能。
内容简介
突触器件作为人工传入神经系统的关键部件,能够模拟生物的突触行为,从而引起研究者们的广泛关注。中国科学院北京纳米能源与系统研究所张弛课题组开发了一种具有仿生物神经感知行为的柔性摩擦电人工突触(TAS)。TAS通过外部刺激成功地展示了一系列突触行为,如兴奋性突触后电流、成对脉冲易化以及从感觉记忆到短期记忆和长期记忆的分级记忆过程。此外,在弯曲半径为20 mm的应变条件下,突触行为保持稳定,在1000次弯曲循环后,TAS仍然表现出良好的耐久性。最后,通过将力和振动分别作为食物和铃声刺激,成功地模拟了巴甫洛夫条件反射。这项工作展示了一种仿生柔性人工突触,将有助于促进人工传入神经系统的发展,这对未来假肢、机器人和仿生学的实际应用具有重要意义。
图文导读
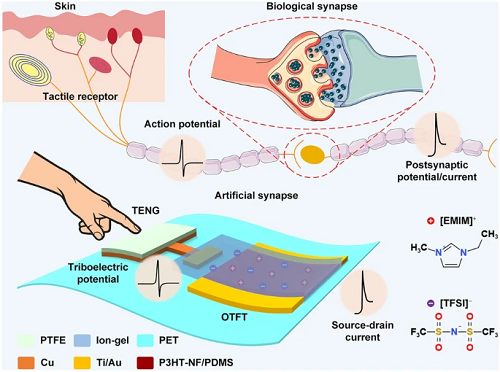
I 生物传入神经系统和柔性摩擦电人工突触(TAS)
图1a显示了生物传入神经系统,该系统由皮肤受体、突触和神经元组成。触觉感受器可以将皮肤接收到的刺激信号转化为尖峰电信号,然后通过神经纤维传递给具有处理功能的生物突触。为了模拟生物神经感知行为,我们设计了一个柔性的TAS,如图1b所示。该TAS是由一个摩擦纳米发电机(TENG)和一个有机薄膜晶体管(OTFT)组成,外部接触起电产生的摩擦电势被视为突触前信号,OTFT的源漏电流类似于突触后电流。图1c显示了OTFT的光学图像和局部放大的光学显微镜图像。图1(d-f)表征了OTFT的电学特性,可以看出,OTFT具有典型的P型晶体管特性,表现出明显的滞后窗口;并且在不同弯曲半径的拉伸和压缩应变状态下,OTFT的电学特性变化很小,可以忽略不计。这是因为用于制备OTFT的每种材料都具有优异的机械柔性,这为TAS的开发提供了可靠的保证
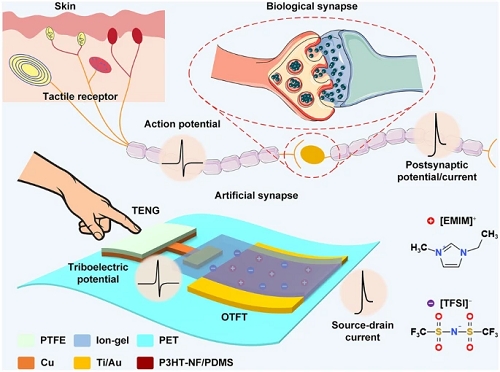
图1. 生物传入神经系统和TAS。(a) 生物传入神经系统的结构示意图;(b) TAS的结构示意图;(c) OTFT的光学图像和局部放大的光学显微镜图像;(d) OTFT的双扫转移特性;(e) OTFT的输出特性;(f) OTFT在不同弯曲半径的拉伸和压缩应变状态下的迁移率。
II TAS的工作机理TAS的工作机理是由接触起电产生的摩擦电势与基于双电层的OTFT的耦合效应,如图2所示。图2a显示了TAS的工作原理示意图,其对应的等效电路图与能带图如图2b、2c所示。用外部接触带电产生的摩擦电势代替OTFT的栅极电压,不仅可以降低器件的功耗,而且可以建立外界环境与器件之间的主动交互机制。
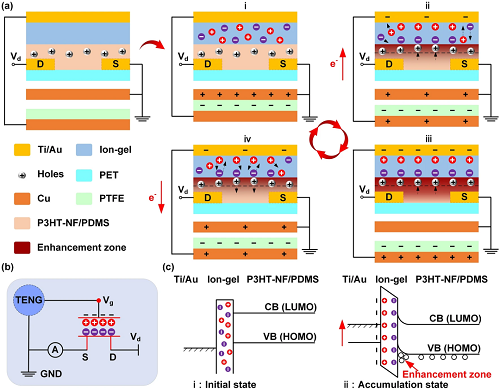 图2. TAS的工作机理。(a) TAS的工作原理示意图;(b) TAS的等效电路图;(c) TAS的能带图。
图2. TAS的工作机理。(a) TAS的工作原理示意图;(b) TAS的等效电路图;(c) TAS的能带图。
III TAS的基本突触特性图3a显示了生物传入神经元与TAS的类比示意图。TAS在持续时间为0.1 s的单次机械刺激作用下激活的电流变化如图3b所示,可以观察到电流迅速上升到峰值,随后逐渐衰减到初始电流。这个过程类似于生物突触的兴奋性突触后电流(EPSC),是神经感知行为的一种基本特性。图3(c-e)进一步研究了TAS输出的EPSC对单次机械刺激持续时间的依赖性。结果表明,单次机械刺激的持续时间越长EPSC峰值越大,并且衰减时间越慢。图3f和g分别显示了TAS在不同弯曲半径的拉伸和压缩应变状态下,持续时间为0.1s的单次机械刺激作用时的EPSC峰值变化。结果显示,TAS对不同弯曲半径下的拉伸和压缩应变不太敏感,EPSC峰值的变化很小可以忽略不计。 图3. TAS的基本突触特性。(a) 生物传入神经元与TAS的类比示意图;(b) TAS在单次机械刺激作用下的EPSC响应变化;(c) TAS在不同持续时间的单次机械刺激连续作用下的EPSC响应变化;(d) TAS在不同持续时间的单次机械刺激作用下的EPSC响应变化对比;(e) TAS在不同持续时间的单次机械刺激作用下的EPSC峰值绝对值和衰减时间;(f) TAS在不同弯曲半径的拉伸应变状态下,持续时间为0.1 s的单次机械刺激作用时的EPSC峰值变化;(g) TAS在不同弯曲半径的压缩应变状态下,持续时间为0.1 s的单次机械刺激作用时的EPSC峰值变化。
图3. TAS的基本突触特性。(a) 生物传入神经元与TAS的类比示意图;(b) TAS在单次机械刺激作用下的EPSC响应变化;(c) TAS在不同持续时间的单次机械刺激连续作用下的EPSC响应变化;(d) TAS在不同持续时间的单次机械刺激作用下的EPSC响应变化对比;(e) TAS在不同持续时间的单次机械刺激作用下的EPSC峰值绝对值和衰减时间;(f) TAS在不同弯曲半径的拉伸应变状态下,持续时间为0.1 s的单次机械刺激作用时的EPSC峰值变化;(g) TAS在不同弯曲半径的压缩应变状态下,持续时间为0.1 s的单次机械刺激作用时的EPSC峰值变化。
IV TAS的典型突触可塑性 一般来说,突触的兴奋性行为可以通过施加多次刺激信号来进一步强化,即典型的突触可塑性。图4(a-e)显示了TAS在一系列成对和多次机械刺激作用下EPSC的响应情况。这些结果表明,通过改变机械刺激的输入模式可以实现TAS的成对脉冲易化(PPF),以及从感觉记忆到短期记忆和长期记忆的分级记忆过程。图4f和g分别显示了TAS在不同弯曲半径的拉伸和压缩应变状态下,持续时间为0.1 s的5次机械刺激作用时的EPSC峰值变化。很明显TAS的EPSC峰值变化很小,这表明弯曲半径对拉伸和压缩应变状态下TAS的输出特性几乎没有影响。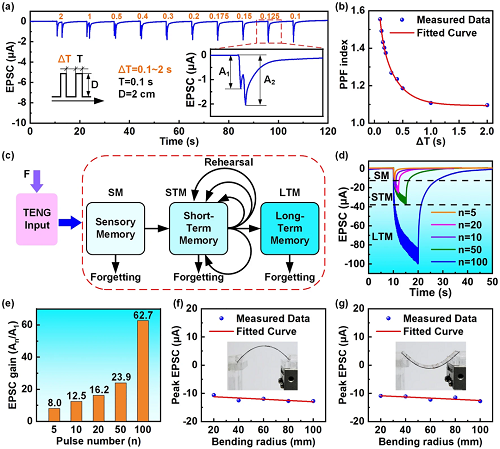 图4. TAS的典型突触可塑性。(a) TAS在不同间隔时间的成对机械刺激作用下的EPSC响应变化,其中插图显示的是TAS在间隔时间为0.125 s的成对机械刺激作用下的EPSC响应变化;(b) TAS的PPF指数;(c) 由TENG作为输入源的多级记忆模型;(d) TAS在连续不同次数机械刺激作用下的EPSC响应变化对比;(e) TAS在连续不同次数机械刺激作用下的EPSC增益;(f) TAS在不同弯曲半径的拉伸应变状态下,持续时间为0.1 s的5次机械刺激作用时的EPSC峰值变化;(g) TAS在不同弯曲半径的压缩应变状态下,持续时间为0.1 s的5次机械刺激作用时的EPSC峰值变化。
图4. TAS的典型突触可塑性。(a) TAS在不同间隔时间的成对机械刺激作用下的EPSC响应变化,其中插图显示的是TAS在间隔时间为0.125 s的成对机械刺激作用下的EPSC响应变化;(b) TAS的PPF指数;(c) 由TENG作为输入源的多级记忆模型;(d) TAS在连续不同次数机械刺激作用下的EPSC响应变化对比;(e) TAS在连续不同次数机械刺激作用下的EPSC增益;(f) TAS在不同弯曲半径的拉伸应变状态下,持续时间为0.1 s的5次机械刺激作用时的EPSC峰值变化;(g) TAS在不同弯曲半径的压缩应变状态下,持续时间为0.1 s的5次机械刺激作用时的EPSC峰值变化。
V TAS的稳定性与耐久性为了评估TAS的稳定性和耐久性,进一步研究了TAS在经过弯曲半径为20 mm的拉伸和压缩应变循环后的输出特性,如图5所示。这些结果表明,在经过连续弯曲的拉伸和压缩应变循环后,TAS的输出特性没有明显的退化。 图5. TAS的稳定性与耐久性。(a) 经过不同次弯曲半径为20 mm的拉伸应变循环后,TAS在不同持续时间的单次机械刺激作用下的EPSC峰值变化;(b) 经过不同次弯曲半径为20 mm的压缩应变循环后,TAS在不同持续时间的单次机械刺激作用下的EPSC峰值变化;(c) 经过不同次弯曲半径为20 mm的拉伸应变循环后,TAS在成对机械刺激作用下的PPF指数;(d) 经过不同次弯曲半径为20 mm的压缩应变循环后,TAS在成对机械刺激作用下的PPF指数;(e) 经过不同次弯曲半径为20 mm的拉伸应变循环后,TAS在不同次数机械刺激作用下的EPSC峰值变化;(f) 经过不同次弯曲半径为20 mm的压缩应变循环后,TAS在不同次数机械刺激作用下的EPSC峰值变化。
图5. TAS的稳定性与耐久性。(a) 经过不同次弯曲半径为20 mm的拉伸应变循环后,TAS在不同持续时间的单次机械刺激作用下的EPSC峰值变化;(b) 经过不同次弯曲半径为20 mm的压缩应变循环后,TAS在不同持续时间的单次机械刺激作用下的EPSC峰值变化;(c) 经过不同次弯曲半径为20 mm的拉伸应变循环后,TAS在成对机械刺激作用下的PPF指数;(d) 经过不同次弯曲半径为20 mm的压缩应变循环后,TAS在成对机械刺激作用下的PPF指数;(e) 经过不同次弯曲半径为20 mm的拉伸应变循环后,TAS在不同次数机械刺激作用下的EPSC峰值变化;(f) 经过不同次弯曲半径为20 mm的压缩应变循环后,TAS在不同次数机械刺激作用下的EPSC峰值变化。
VI TAS的巴甫洛夫条件反射实验最后,通过改进TAS的输入结构,进一步研究了TAS的巴甫洛夫条件反射,其结构示意图如图6a所示。因为离子凝胶能够通过多个电极进行控制,故TAS的输出特性可以由两个不同TENG产生的摩擦电势进行调控,其对应的等效电路图如图6b所示。在这个模拟实验中,由振动驱动的TENG-1被视为是“铃声”输入源,而由力驱动的TENG-2则被视为是“食物”输入源。图6(c-e) 分别显示了训练次数为20、50和100次时,TAS的EPSC响应变化。可以看出随着训练次数增加维持“垂涎”反应的时间越长。实验结果表明,该TAS能够有效地模拟条件反射,这将对今后仿生学中的运动反馈研究提供有效帮助。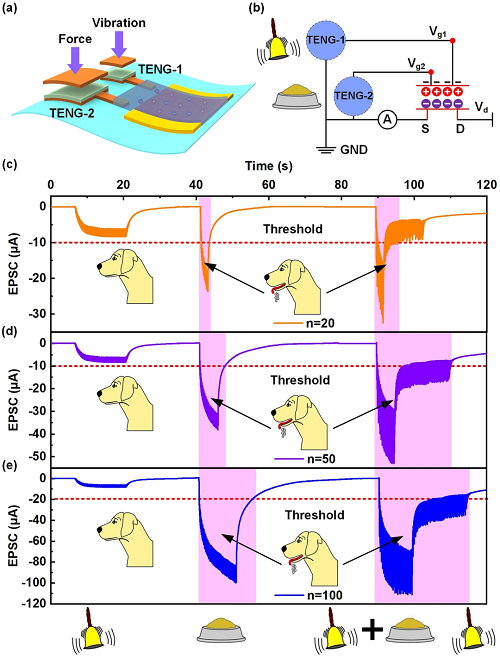 图6. TAS的巴甫洛夫条件反射实验。(a) 双TENG模式下TAS的结构示意图;(b) 双TENG模式下TAS的等效电路图和巴甫洛夫条件作用类比;(c)-(e) 训练次数分别为20、50和100次时,TAS的EPSC响应变化。
图6. TAS的巴甫洛夫条件反射实验。(a) 双TENG模式下TAS的结构示意图;(b) 双TENG模式下TAS的等效电路图和巴甫洛夫条件作用类比;(c)-(e) 训练次数分别为20、50和100次时,TAS的EPSC响应变化。
作者简介
 张弛
张弛
本文通讯作者
中国科学院北京纳米能源与系统研究所 研究员
▍主要研究领域纳米发电机与摩擦电子学。
关于我们
 Nano-Micro Letters《纳微快报(英文)》是上海交通大学主办、在Springer Nature开放获取(open-access)出版的学术期刊,主要报道纳米/微米尺度相关的高水平文章(research article, review, communication, perspective, highlight, etc),包括微纳米材料与结构的合成表征与性能及其在能源、催化、环境、传感、电磁波吸收与屏蔽、生物医学等领域的应用研究。已被SCI、EI、PubMed、SCOPUS等数据库收录,2021JCR影响因子为 23.655,学科排名Q1区前5%,中科院期刊分区1区TOP期刊。多次荣获“中国最具国际影响力学术期刊”、“中国高校杰出科技期刊”、“上海市精品科技期刊”等荣誉,2021年荣获“中国出版政府奖期刊奖提名奖”。欢迎关注和投稿。
Nano-Micro Letters《纳微快报(英文)》是上海交通大学主办、在Springer Nature开放获取(open-access)出版的学术期刊,主要报道纳米/微米尺度相关的高水平文章(research article, review, communication, perspective, highlight, etc),包括微纳米材料与结构的合成表征与性能及其在能源、催化、环境、传感、电磁波吸收与屏蔽、生物医学等领域的应用研究。已被SCI、EI、PubMed、SCOPUS等数据库收录,2021JCR影响因子为 23.655,学科排名Q1区前5%,中科院期刊分区1区TOP期刊。多次荣获“中国最具国际影响力学术期刊”、“中国高校杰出科技期刊”、“上海市精品科技期刊”等荣誉,2021年荣获“中国出版政府奖期刊奖提名奖”。欢迎关注和投稿。
Web: https://springer.com/40820
E-mail: editor@nmlett.org
Tel: 021-34207624
如果文章对您有帮助,可以与别人分享!:Nano-Micro Letters » 仿生物神经感知行为的柔性摩擦电人工突触
 喜讯!19位NML编委入选 2024 年度科睿唯安高被引科学家名单
喜讯!19位NML编委入选 2024 年度科睿唯安高被引科学家名单 暨南大学刘冲/麦耀华等:生长动力学诱导添加剂分布实现高效稳定的钙钛矿电池和组件
暨南大学刘冲/麦耀华等:生长动力学诱导添加剂分布实现高效稳定的钙钛矿电池和组件 NML文章集锦| 光电材料与器件(二)
NML文章集锦| 光电材料与器件(二) 华南师范大学郑奇峰等:具有空腔诱导阴离子捕获效应的多孔有机笼基准固态电解质
华南师范大学郑奇峰等:具有空腔诱导阴离子捕获效应的多孔有机笼基准固态电解质